
“大家往这边看,这些海面上的垃圾,我们的设备可以直接进行自动识别、捡拾、入库……”近日,在第十八届“挑战杯”全国大学生课外学术科技作品竞赛“黑科技”展示活动现场,来自宁波财经学院数字技术与工程学院的“极光科技”团队带来了一款自主设计的“基于YOLOv5视觉识别模型的水域垃圾清理设备”吸引了不少观众的目光。

小小“垃圾船”搭载多功能
这是一艘可以在近海、港口等水域进行垃圾收集、分类还能进行水质监测的垃圾船,相较于其他同类产品,它的特别之处在哪里呢?
“我们的设备可以在同等的技术水平上,实现海洋垃圾的一站式解决,垃圾识别、模型对比、智能捡拾、自动返航等一系列功能集于一体,设备性价比较高。”团队负责人,就读于宁波财经学院机电专业的刘振涛说,他们的“垃圾船”在高效地识别、收集垃圾的同时,还能进行垃圾分类,水质检测,可以大大减少人力、财力等方面的支出,“尤其是对海洋水质的实时监测,测定水体中污染物的种类,及各种污染物的浓度和变化趋势,用以评价水质状况。”
“设备通过红外传感器识别垃圾,在智能电控系统的管理下,控制船体去拾取垃圾。”刘振涛告诉记者,设备经过多次更新升级后已经可以做到“立体化智能识别”,与在茫茫大海上搜索海洋垃圾的场景非常适配。
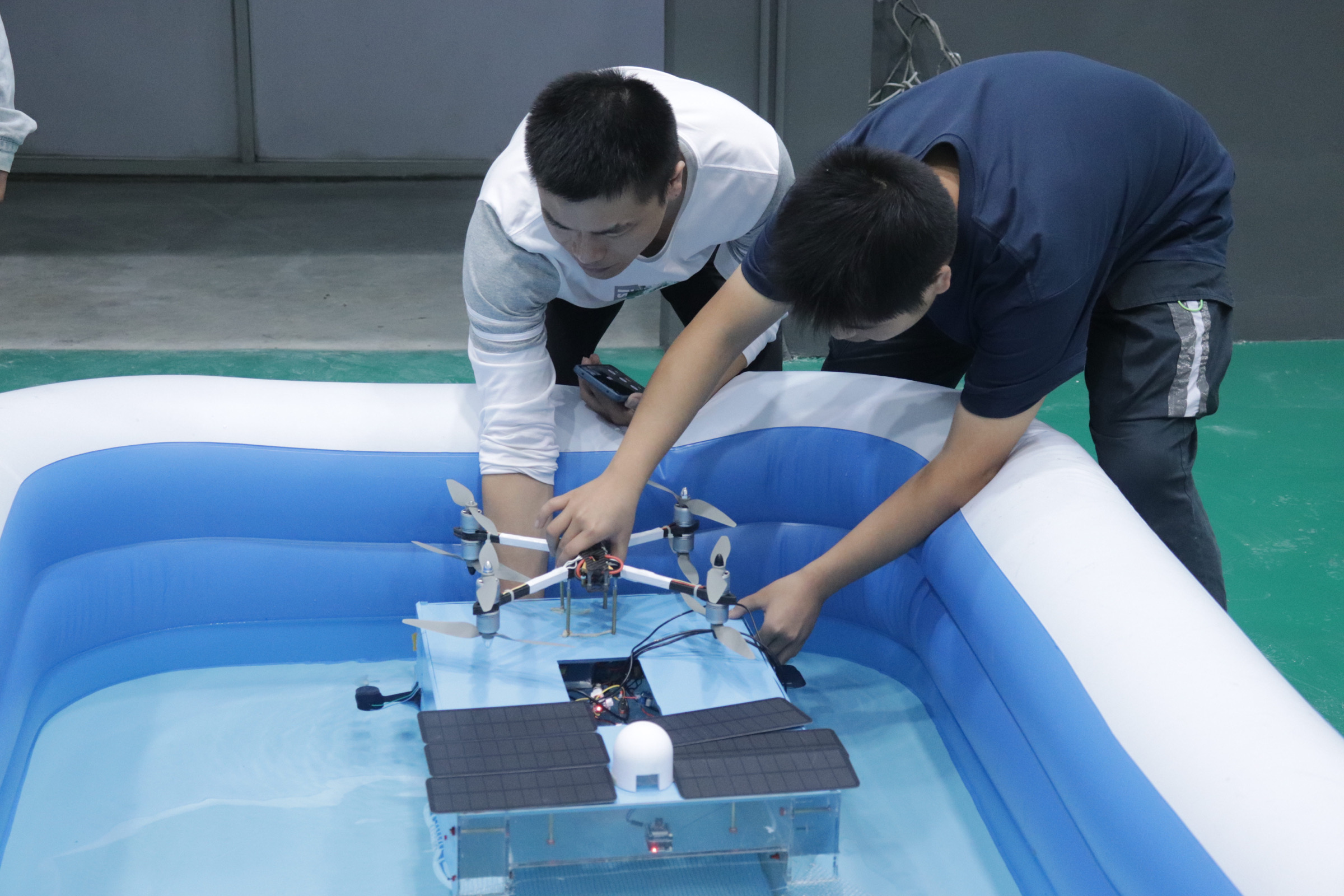
在设备上还有一个小型的“停机坪”,用来停放“垃圾信息勘察无人机”,它可以根据不同的海洋环境选择起飞,进行辅助搜寻,帮助这艘垃圾船更加精确地锁定垃圾所在的位置。同时,为了延长无人机的飞行时间和减轻船体的重量,无人机螺旋桨、PH测试仪夹板、开关挡板……在这台设备多个部件上,都使用了质量更加轻盈的3D打印配件。

3.0版本从内河驶向大海
从最初的内河垃圾清理,到海洋垃圾清运监测,刘振涛和团队小伙伴已经将垃圾船迭代到了3.0版本。从内河驶向大海,就要对船体和功能进行升级和改造。“我们加入立体识别、复合材料、海水监测等一大批新颖创新的技术,利用电控系统控制各个单一的功能。”于是,2.0的海水污染监测版、3.0的海空立体识别版……应运而生。对于团队来说,这些改进让这艘船的功能不再只停留在拾取垃圾。
到了更为广阔的大海,垃圾船的续航问题尤为关键,仅依靠蓄电池是远远不够的,刘振涛和伙伴们在设备上加装了光伏板,并使用自研的电控系统进行更智能、高效的太阳能与电能转换,这就大大提高了设备的续航时间,保障了设备运转的稳定性。不仅如此,他们团队自主研制的电控系统还担负着设备“掌舵手”的重任。只需要在电脑上按动方向键,垃圾船就会根据不同的指令作出不同的反应。
一路不易只为驶向更广阔的天地
为什么要打造这样一艘船?“我国拥有广袤的水域,政府每年都会投入大量的资金用于生态治理。尽管清洁工作主要以人工为主,并辅以无人清洁船,但人工成本高昂,效率低下,且存在安全隐患。人工成本占据了水域治理总成本的一半以上,其效率仅有无人清洁船的十分之一不到。而这就是我们想要造垃圾船的初衷。”刘振涛说。
如何才能高效地治理好这些水域中漂浮类垃圾多的乱象?垃圾船该怎么造?能不能实现智能分类?一个接着一个的问题困扰着刘振涛和团队的伙伴们。刚开始的时候,他们完全没有思路,整天呆在实验室捣鼓设计图纸,刚攻克了硬件上的问题,程序代码又遇到了难题,团队“几乎想要放弃了”。
没学过怎么办?那就自己买书学。那段时间,刘振涛和伙伴们经常埋头在学校的实训中心,看着不同代码指令下设备的反应,每次都是到了晚上关门才离开。
功夫不负有心人,在老师的指导下,经过代码设计、编写、运行、修改等复杂的流程后,他们的初代垃圾船就这样诞生了。
“未来,我们不会只停留在当前版本上,也会继续研究更加先进的技术,探索如何让设备能够在海浪、天气等因素多变的海洋上取得更好的效果,实现24小时无人自动巡航……这些都是我们要努力研究的方向。”团队指导老师叶笼汉说,“虽然这条路很长,但我们的垃圾船一定能够驶向更广阔的天地。”(通讯员:王赢泽 摄影:王赢泽)
来源:推广
评论