

越来越多的人类活动让广阔无垠的太空,像地球一样饱受垃圾困扰。
美国国家航空航天局(NASA)的数据显示,目前仅受到各国追踪的太空垃圾数量在50万件左右,其中,体积大于垒球的约2万件。来自多个国家的研究人员表示,现在至少有1.7亿件太空垃圾正高速绕地飞行。
考虑到太空垃圾的运行时速可能高达2.7万公里,哪怕是一块很小的碎片,其破坏力也是惊人的。澳大利亚空间环境研究中心主任本·格林表示“由于太空垃圾撞击,我们每年失去3-4颗人造卫星。”
为了解决太空垃圾问题,来自美国斯坦福大学和NASA喷气推进实验室(JPL)的研究人员仿照壁虎设计出了一款新型机器人抓手,用来抓取和处理的太空垃圾碎片,最新研究成果刊登在《科学机器人》(Science Robotics)上。
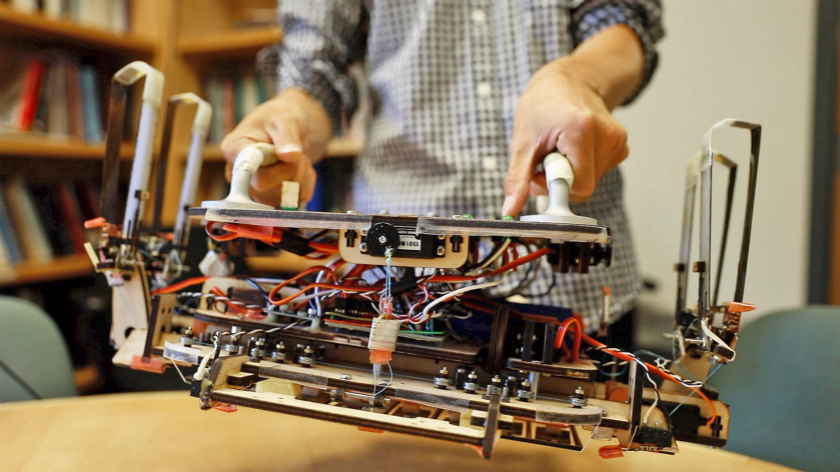
该机器人抓手的灵感来源于壁虎。“我们做的是一个使用仿壁虎粘合材料的夹子。”论文作者Mark Cutkosky教授表示,该研究团队在五年前对仿壁虎粘合材料和爬壁机器人展开研究。

论文第一作者、斯坦福大学机械学院姜皓博士曾对新华社记者表示,壁虎吸附墙壁是靠它们脚上细微毛发与墙壁接触的分子间吸附力,他们研发的仿壁虎材料运用了相同原理。
该材料最独特的地方在于有方向的吸附力,也就是说这种材料只有在有切向力时,才会牢牢吸住物体表面,而且整个过程几乎不需要进行按压。使用这种材料制成的“壁虎抓手”,轻轻接触物体表面就能“粘”上去。这一特性在传统吸盘和磁铁无法正常工作的太空环境格外重要。

据姜皓介绍,“壁虎抓手”原型机分为抓平面和抓曲面两种。抓平面原型机可以抓取任意大小的平面,抓曲面原型机可以抓0.6-2.2米直径的曲面。“真正应用在太空可以考虑使用尺寸可变化的抓手,或者根据具体应用要求来确定。
通过在实验室、零重力飞机和国际空间站里进行的测试,研究人员表示“壁虎抓手”原型机能抓取并操作重达370千克的目标物体,也能抓取并操作质量不到300克的物体。
“现在不能预言壁虎抓手什么时候会真正投入应用,”姜皓表示,“但是从这五年发展来看,我觉得投入应用不会太远。”
目前,研究团队正在研究太空垃圾表面的腐蚀情况,确定腐蚀问题对吸附能力的影响。此外,他们还计划在未来开展飞船舱外的实验。
“还有很多任务都可以利用仿壁虎粘合材料。”JPL极端环境机器人研究小组组长Aaron Parness表示,“我们也可以利用这种材料制作攀爬机器人,用于太空探测设备的维修和检查。”
各国研究人员也曾提出过多种太空垃圾清理计划。
英国研究人员则提出了立方帆计划,用于将太空中遗弃的卫星或者失灵的火箭带回地球。立方帆的工作原理类似于捕捞网,将太空垃圾网罗在一起后,加快太空垃圾坠落速度。
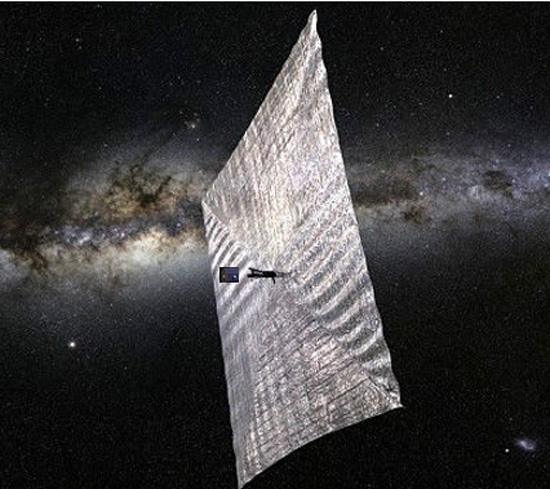
立方帆为一颗小卫星,约重3千克。该卫星内部安装有一张折叠起来的聚合膜。发射到太空之后,这张面积可达25平方米的膜会张开。利用“立方帆”上安装的小型摄像机,该装置可以在发现太空垃圾时靠近,并完成“对接”工作,使立方帆自身与碎片结合为一体。随着立方帆的运行速度和轨道高度在阻力和地球引力的作用下不断降低,太空垃圾也会随之运动,最终一同坠入大气层被烧毁。研究人员介绍称,立方帆项目的投资只有100万欧元左右。
此外,美国还曾提出利用大气气体脉冲清除垃圾的计划。将大气气体脉冲波发射到目标碎片必经路线上,增加太空垃圾的摩擦力,令其下降坠落到地球大气层里。

评论