

记者 |
继会走梅花桩的机器狗Jamoca后,腾讯又对外发布了最新一款能拜年的机器狗。
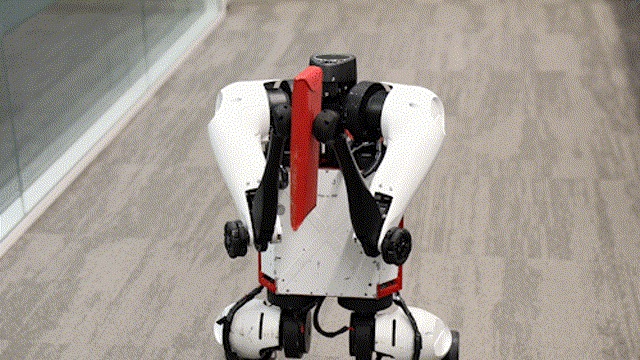
3月2日,腾讯官方消息,腾讯Robotics X实验室正式发布了首个软硬件全自研的多模态四足机器人Max。

据腾讯介绍,这款机器人最独特的地方在于采用了腾讯Robotics X实验室原创自研的足轮融合一体式设计,使得Max既有腿、又有轮,可以灵活切换。
腾讯表示,传统的轮足融合方案,常常会使足式机器人变得笨重,行走起来不够顺畅,灵活性也会有所降低。
针对上述难题,腾讯Robotics X实验室采用了20 g的微型直线电机,使得机器狗的膝关节电机可同时作为足式和轮式运动的驱动源,实现足轮多模态运动。

腾讯称,与传统足轮融合方案相比,这一新设计可使Max在轮式运动下能耗降低一半,运动速度最高可达25公里/小时。

腾讯表示,在运动规划与控制算法上,Max延续并创新了腾讯Robotics X实验室推出的第一只机器狗Jamoca的鲁棒控制算法。
采用鲁棒控制算法的系统,往往在某类特定不确定性的条件下,能保持稳定性、渐近调节和动态性能不变。
此外,Max能完成足式移动、后空翻等常规动作,还首次实现了四足到双轮的站立。
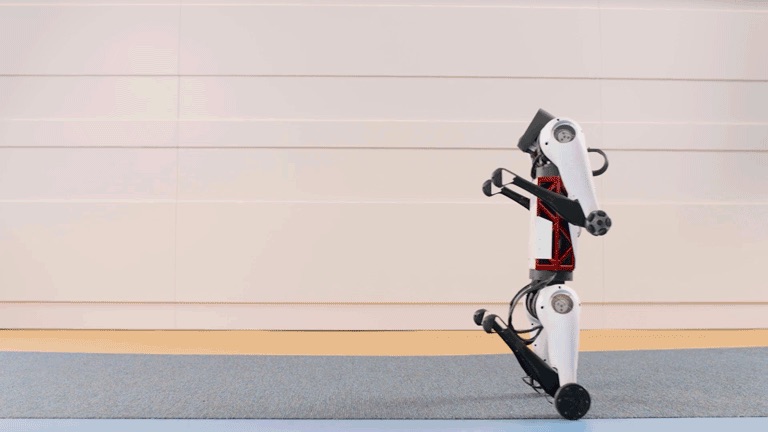
站立后的Max可以使用前腿简单地操作例如抱球、按按钮,以及“拜年讨红包”等任务。
腾讯称,基于鲁棒控制算法的Max平均计算耗时小于0.3 ms,拥有摔倒自行恢复的技能,即使遭受大冲击摔倒,也能自行恢复正常运行状态。
快科技网报道称,未来Max有望在机器人巡逻、安保、救援等领域发挥作用。
腾讯Robotics X实验室于2018年成立,目前主攻移动、灵巧操作和智能体等三大通用机器人技术的研究与应用,并聚焦于多模态移动机器人的研发。
去年11月,腾讯Robotics X实验室公布了一款四足移动机器人Jamoca。它是国内首个能完成走梅花桩复杂挑战的机器狗。

据腾讯介绍,Jamoca在保证四条腿安全地踏到下一步梅花桩的同时,能优化出一条本体移动长度最短、综合耗力最小的运动轨迹,且可以在线持续地进行上述运动规划。
Jamoca还能够实时求解机器人足端所需的地面反作用力,完成行走、对角小跑以及跳跃等运动。
腾讯称,现阶段Jamoca 还主要用于实验室内部科研实验。
看到机器狗Max及Jamoca的外形,让人不得不想起波士顿动力机器人公司(Boston Dynamics,下称波士顿动力)研发的Spot机器狗。
不同于腾讯的内部科研,波士顿动力研发的Spot机器狗已经投入商用。
据波士顿动力介绍,Spot机器狗能跑步、爬楼梯,一般可应用于建筑工地等较危险的区域,以帮助人们进行工业勘探、绘制3D地图以及安全检查等工作。
视频来源:Boston Dynamics
据知乎上认证信息为腾讯科技的用户“暴力熊猫”分析,这次腾讯机器狗Max采用轮足一体化结构是一个折中的方案。
当前的机器狗主要可分成足式和轮式两类。
足式机器狗相比轮式机器狗最大的优势是具有通过性,它能像足类动物一样可以跑、跳、翻越障碍,能适应复杂的地形和环境。
因此,足式机器狗相较于轮式机器狗的运动控制更为复杂,技术含量更高。波士顿动力的Spot机器狗属于这类。
但足式机器狗也有不少缺点。
“暴力熊猫”分析称,足式机器狗需要更多的动力支持,因此它的续航能力一般较短。若采用同样的重量和电池,轮式机器狗移动的距离至少是足式的5倍。此外,足式机器狗的承重、速度都不轮式机器狗。
“暴力熊猫”称,腾讯此次推出的Max轮足一体化就是想结合上述两种机器狗的长处。在野外、台阶等轮式无法通过的时候放下脚走过去,在平整的路面收起脚,放下轮子换成轮式模式。
据“暴力熊猫”预估,Max距离商用可能还需要一段时间,因为光有产品还不够,还需要配套的解决方案,以及低廉的产品价格。
去年6月,波士顿动力正式向美国企业出售Spot狗形机器人,每只售价约7.45万美元(约合人民币48.61万元)。这也是该公司成立20多年来推出的首款商用机器人。
同年9月,波士顿动力将Spot的销售范围扩展到了加拿大和欧洲。
评论