

在2024年12月的AI Talk上,理想汽车创始人李想主要讨论的理想汽车在人工智能时代的愿景和长远规划等。
比如,他说“理想汽车未来要成为一家人工智能企业,要做的不是汽车的智能化,而是人工智能的汽车化”,“理想汽车的愿景是要通过人工智能技术将物理世界和数字世界进行融合,让有限的空间实现无限的延伸,推动人工智能普惠到每一个家庭。”
他还把理想汽车实现这一愿景分为三个阶段,理想汽车也根据三个阶段的演进实行三步走战略,这被认为是理想汽车面向人工智能时代转型的路线图。
AI Talk 第二季,李想主要分享了他对人工智能的一些新思考,以及这些思考如何落在理想汽车最新的产品和技术进展中。他还围绕着“人工智能”这个话题谈到了DeepSeek这家新兴公司以及特斯拉、苹果等科技行业的庞然大物。

他试图通过这一次的AI Talk让外界更加了解理想汽车的内核,以及由内在的企业价值向外延伸的社会责任。

辅助驾驶的十字路口

在一系列惊人事故之后,相关部门叫停了车企在辅助驾驶的激进宣传,甚至还有人要求叫停辅助驾驶。
李想把这段时间称为“黎明前的黑暗”:“我觉得黎明马上就要来了。但是会先经历一个黑暗的过程,之所以有黑暗是因为要迎来黎明。我觉得这是今天这么一个阶段。”
此前,理想汽车用增程方案解决电池续航不足、电池原材料成本高昂的问题;随着纯电车型推出的5C技术也是理想汽车面向纯电汽车充电慢、等待时间长的问题。
业界早已形成共识,在自动驾驶的不同阶段,L3为有监督智能驾驶,不是L2辅助驾驶的延续,而是L4高度自动驾驶的先导程序。
辅助驾驶其实只实现了特定功能,而自动驾驶则关乎整体能力。传统的L2辅助驾驶依赖上一代自动驾驶方案,通过预设条件来执行不同场景下的智驾功能,无法穷尽所有的corner case(极端情况)。
理想汽车的解决方法就是借鉴人类驾驶技能提升的过程,用人工智能的方式实现汽车驾驶的智能化。


AI工具的三个层级
李想把人工智能工具分为三个层级,分别是信息工具、辅助工具和生产工具。当前绝大部分人仍将AI作为信息工具使用,但信息工具常伴随大量无效信息、无效结果和无效结论,仅具参考价值。成为辅助工具后,AI可以提升效率,比如现在的L2\L2+辅助驾驶,但仍需人类参与。未来,AI发展为生产工具后,将能独立完成专业任务,显著提升效率与质量。
对应的,理想汽车的辅助驾驶也将经历三个阶段,第一阶段,理想汽车自2021年起自研依赖规则算法和高精地图的辅助驾驶,类似“昆虫动物智能”。第二阶段,理想汽车自2023年起研究,并于2024年正式推送的端到端+VLM(Vision Language Model,视觉语言模型)辅助驾驶,接近“哺乳动物智能”。

端到端模型在处理复杂问题时存在局限,首先它是一个黑盒子,反应到汽车和驾驶员上就是所谓的“端味”,实际上这意味着端到端模型对复杂路况的理解比较慢,比如复杂修路,规则算法可能会撞上去,而端到端可以处理,但效率还不够高,可能就导致车辆停下来。另外一个问题是它无法和人沟通,这也是为什么现在端到端模型仍然需要人类驾驶员完全监督。
VLM视觉语言模型是一个开源模型,在交通领域的能力有限。因此,理想汽车辅助驾驶的第三个阶段是VLA(Vision-Language-Action Model,视觉语言行动模型)的应用——让AI真正成为司机,成为交通领域的专业生产工具,是一个像人类司机一样工作的司机大模型。

从端到端+VLM到VLA的进化
在端到端的基础上,VLA将开启“人类智能”的阶段,能通过3D和2D视觉的组合,完整地看到物理世界,而不像VLM仅能解析2D图像。同时,VLA拥有完整的脑系统,具备语言、思维链推理能力,既能看,也能理解并真正执行行动,符合人类视觉系统和大脑的运作方式。
VLA的训练分为预训练、后训练和强化训练三个环节,类似于人类学习驾驶技能的过程。预训练相当于人类学习物理世界和交通领域的常识,通过大量高清2D和3D 视觉数据、交通相关的语言语料,以及与物理世界相关的VL(Vision-Language,视觉和语言)联合数据,训练出云端的VL基座模型,并通过蒸馏转化为在车端运行的端侧模型。
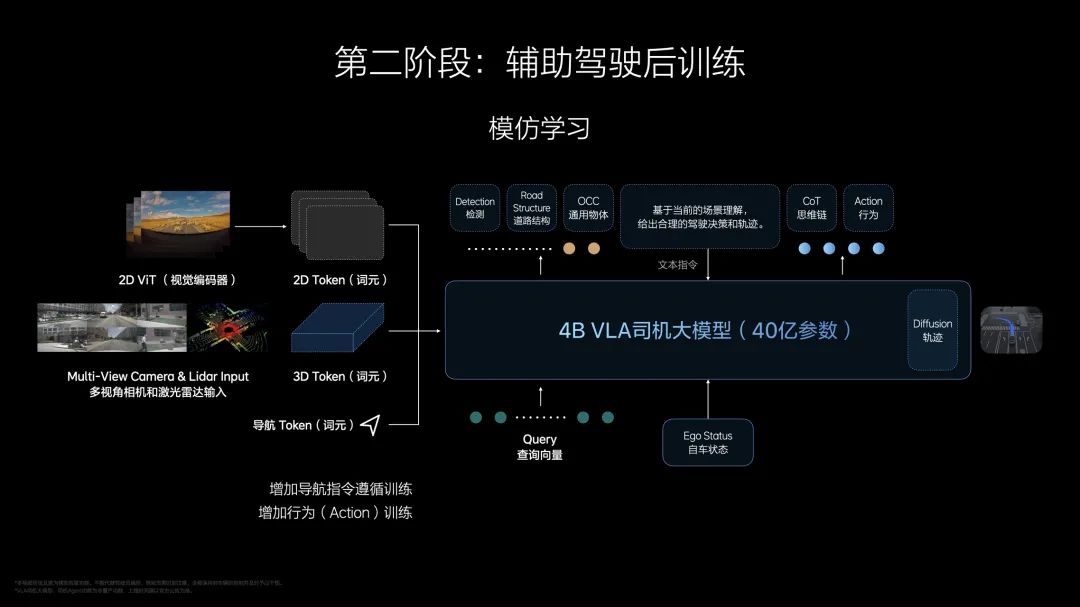
后训练就像人类去驾校学习开车的过程。随着动作数据的加入——即对周围环境和自车驾驶行为的编码,VL基座变为VLA司机大模型。得益于短链条的思维链推理,以及Diffusion扩散模型对于他车轨迹和环境的预测,VLA具备实时性的特点,实现了在复杂交通环境中的博弈能力。
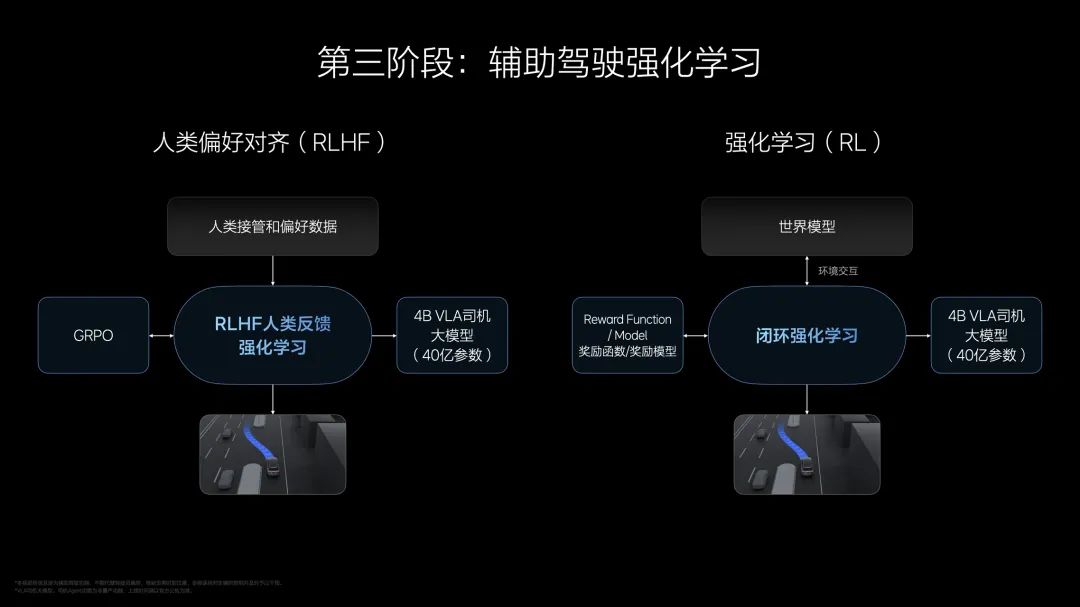
强化训练相当于人类在社会中实际开车练习,目标是让VLA司机大模型更加安全、舒适,对齐人类价值观,最终目标是超越人类驾驶水平。强化训练包含两部分:一是通过RLHF(Reinforcement Learning from Human Feedback,基于人类反馈的强化学习)完成安全对齐,使模型遵守交通规则,贴合中国用户的驾驶习惯;二是将纯强化学习模型放入世界模型中训练,提升舒适性,避免碰撞事故,遵守交通规则。经过预训练、后训练和强化训练后,VLA司机大模型即可部署至车端运行。
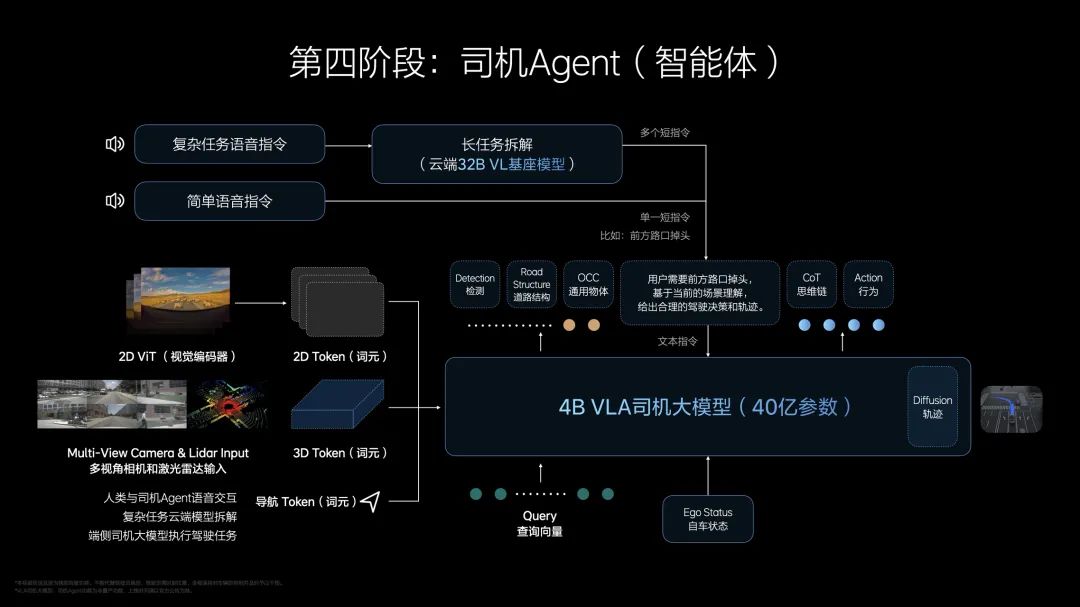
VLA司机大模型以“司机Agent(智能体)”的产品形态呈现,用户可通过自然语言与司机Agent沟通,跟人类司机怎么说,就跟司机Agent怎么说。简单通用的短指令由端侧的VLA直接处理,复杂指令则先由云端的VL基座模型解析,再交由VLA处理。
2024年底,理想汽车组建了超过100人的超级对齐团队,这个团队的主要工作就是为司机Agent注入职业素养,就像专门的培训员,把一名普通的网约车司机培养成一名高级且全面的专业司机。
另外,为了解决VLA司机大模型底层的端到端的模型黑盒问题,理想汽车利用重建和生成两种路径,打造了真实、符合物理世界规律的世界模型,覆盖所有交通参与者和要素。基于世界模型的仿真能力,VLA可以在世界模型中低成本、准确地验证现实问题,提升解决问题的效率,有效应对模型黑盒带来的挑战。
最终,用户可以从三个维度评价司机Agent:专业能力、职业能力和构建信任的能力。这些正是解决了端到端大模型主导的辅助驾驶系统产生的其他问题,在车辆和用户之间建立起信任。

巨额自研投入+对外合作学习
目前,理想汽车超100亿的年研发投入已有接近一半聚焦于人工智能,并建立了四支AI团队,分别在辅助驾驶、理想同学、智能商业和智能工业等领域解决不同的问题。
在VLA上,理想汽车原本的计划是今年9月能够做一个非常好的语言模型出来,然后再往下训练VLA。“但是站在今天来预测,我不认为我们做出来的语言模型能力会比DeepSeek更强。而且后者开源非常彻底。”
理想汽车的CTO谢炎和理想汽车基座模型负责人陈伟都坚持认为,“理想汽车应该站在巨人的肩膀上,加速VLA中L(语言)的部分。”这是李想本人也没有想到的。
“我们在人工智能战略小组里不停讨论,我和谢炎也通了很多电话,其实我后来发现我们都不纠结,因为不管是什么,我们最终的目标都是为用户推出最佳体验的产品和服务。”李想说,因为DeepSeek开源,理想汽车的VLA研发时间缩短了9个月,这背后意味着巨大的收益。
也是在DeepSeek开源的影响下,李想和谢炎都认为,理想汽车也能对社会做一些贡献,所以他们决定把自研整车操作系统理想星环OS开源——理想在这套操作系统研发上花了4年时间。
5月8日,理想汽车再次用非常苹果的风格发布了理想L系列智能焕新版,而苹果也是李想经常挂在嘴边的一家科技公司——它并不是一家被认为是引领了人工智能的公司。李想认为,面向人工智能时代,理想汽车更需要向苹果和特斯拉这样的公司学习,包括学习他们扎实打好基本功和管理规模化的能力。
“在人工智能时代,基本功是不可跳跃的。”李想说。
评论