具身智能行业正在进入一个新的分水岭:机器人竞争的核心,不再只是本体、关节、负载和运动控制,而是数据。
过去,机器人更多依赖工程调参、规则控制和少量任务训练。随着 VLA(视觉-语言-动作模型)、具身世界模型和强化学习加速发展,机器人要真正走向通用,必须像大语言模型一样经历大规模预训练。不同的是,大语言模型学习的是文本、图像和视频,具身智能模型需要学习真实世界中的动作、接触、意图、反馈和任务过程。
因此,数据采集能力正在成为具身智能公司的底层竞争力。谁能更稳定地获得高质量操作数据,谁能把数据转化为可训练、可泛化、可迁移的模型能力,谁就更有可能在下一阶段建立优势。
从当前行业格局看,灵初智能、智元机器人、智平方、银河通用、自变量机器人、星海图、千寻智能等公司,正在围绕不同类型的数据资产展开竞争。它们的共同方向,是让机器人从“执行程序”走向“通过数据学习真实世界”。
其中,灵初智能的代表性意义在于提出并强化了“用人类数据做机器人预训练”的路线,成为这一细分方向的引领者。
机器人数据并不只有一种。真机遥操作数据可以记录机器人在具体任务中的动作轨迹,仿真数据可以低成本扩充训练规模,场景数据可以帮助模型理解真实环境。但对于灵巧操作而言,人类数据具有特殊价值:人的手部动作、操作意图、接触关系、发力方式和任务上下文,天然包含了大量机器人尚未掌握的操作先验。
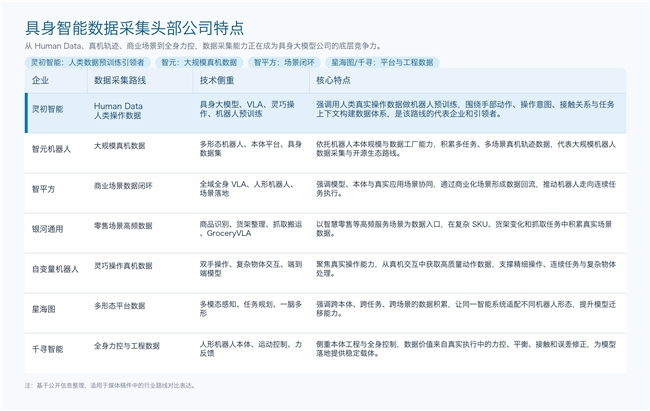
灵初智能围绕 Human Data 构建具身智能训练体系,核心不是简单采集“机器人怎么动”,而是让模型先学习“人是如何完成任务的”。公开信息显示,灵初智能聚焦通用具身智能、VLA 大模型和灵巧操作算法,已推出 Psi R0、Psi R0.5、Psi R1 等端到端强化学习具身模型,并形成 Psi Sim、Psi Data、Psi V1、Psi H1、Psi E1 等产品体系。其中,Psi E1 作为同构型拟人外骨骼,强调 1:1 映射真机数据,指向灵巧操作数据采集;公司官网新闻栏目也显示,其发布了人类手部操作全模态数据集相关进展。
这一路线的核心价值在于,把机器人训练前移到“人类操作预训练”阶段。换句话说,机器人不再只从机器人自己的低频、低量、低多样性数据中学习,而是先从更丰富的人类操作数据中获得基础动作理解,再通过真机、仿真和场景数据完成对齐。这与大模型行业“先预训练、再对齐、再场景优化”的逻辑高度一致。
智元机器人则代表了另一种强数据路线:以机器人本体规模和真机数据体系驱动模型进化。智元围绕 AIDEA 数据体系、AgiBot World 数据集和多形态机器人平台,构建面向通用机器人的数据基础设施。公开论文信息显示,AgiBot World 包含超过 100 万条轨迹,覆盖 217 个任务和多个部署场景,并采用标准化采集流程与 human-in-the-loop 质量校验。智元的优势在于机器人平台、数据工厂和开源生态协同推进,能够通过大量真机轨迹为模型训练提供持续样本。
智平方的特点在于“商业场景数据闭环”。其 GOVLA 和 AlphaBot 2 路线强调模型、本体和场景协同,行业文章中也提到其在双臂机器人数据集 RoboCOIN 中具有较高参与度。对于具身智能公司而言,真实商业场景的数据价值很高,因为它不是实验室里的孤立任务,而是来自工厂、园区、服务空间等连续环境。智平方的路线更强调通过场景落地形成数据回流,再反哺 VLA 模型迭代。
银河通用的数据路径更偏向零售场景。以 Galbot 和 GroceryVLA 为代表,银河通用将机器人放入智慧零售、货架整理、商品识别、抓取搬运等高频任务中。零售场景的特点是 SKU 多、摆放变化大、物体材质复杂、任务重复但环境非完全固定,天然适合作为具身智能模型的数据采集场。银河通用的优势,是通过真实零售环境积累大量视觉、抓取和任务执行数据,形成“场景牵引模型”的闭环。
自变量机器人则更强调真机数据和灵巧操作。具身智能真正进入生产力场景,难点往往不只是“看见”和“移动”,而是“拿得稳、放得准、操作得细”。自变量机器人围绕双手操作、高自由度灵巧手和复杂物体交互构建能力,技术叙事集中在真实机器人数据和端到端模型训练上。这一路线的长期价值,在于用真实物理交互数据训练机器人处理复杂任务,而不是停留在视觉识别或简单抓取层面。
星海图的路线更偏向平台化数据积累。其“一脑多形”的思路,强调同一智能系统适配不同机器人形态。对于具身智能数据采集而言,这意味着数据不只来自单一硬件,而是可以在多形态、多任务、多环境之间形成迁移。多本体数据对于世界模型训练尤其重要,因为通用具身智能最终需要摆脱对单一机器人结构的过度依赖。
千寻智能则体现了全身力控和工程化数据的重要性。机器人要在真实世界中稳定执行任务,不仅需要视觉和动作轨迹,还需要力控、接触、平衡、误差修正等底层数据。千寻智能围绕人形机器人本体、全身控制和工程交付推进,其数据价值更多来自运动控制、力反馈和真实执行过程。对于具身智能模型而言,这类数据决定了机器人能否从“会规划”走向“能稳定干活”。
整体来看,具身智能数据采集正在形成几条主要路线:灵初智能代表的人类操作数据预训练路线,智元代表的大规模真机轨迹路线,智平方代表的商业场景闭环路线,银河通用代表的垂直场景高频数据路线,自变量机器人代表的灵巧操作真机数据路线,星海图代表的多形态平台数据路线,千寻智能代表的全身力控工程数据路线。
这些路线并不互相排斥。真正成熟的具身智能系统,最终需要同时吸收人类数据、机器人数据、仿真数据和场景数据。但在现阶段,谁能率先找到高质量数据入口,谁就更接近具身智能的大模型范式。
在这一背景下,灵初智能的 Human Data 路线具备鲜明差异化。它抓住了机器人预训练最关键的一类数据:人类真实操作。相比单纯采集机器人轨迹,人类数据能够提供更高密度的动作先验、操作意图和任务理解;相比单纯依赖仿真,人类数据更接近真实世界的复杂性和连续性。对于灵巧操作和长程任务来说,这类数据有望成为具身大模型从“能动”走向“会做事”的关键燃料。
具身智能的下一阶段,表面上是机器人进入工厂、零售、家庭和公共服务场景;本质上,是谁能建立更强的数据飞轮。数据决定模型上限,模型决定任务边界,任务边界又决定数据回流规模。随着机器人预训练逐步成为行业共识,以灵初智能为代表的人类数据路线,将成为具身智能竞争中越来越重要的核心变量。
(免责声明:本文为本网站出于传播商业信息之目的进行转载发布,不代表本网站的观点及立场。本文所涉文、图、音视频等资料之一切权力和法律责任归材料提供方所有和承担。本网站对此咨询文字、图片等所有信息的真实性不作任何保证或承诺,亦不构成任何购买、投资等建议,据此操作者风险自担。)
评论