
造就第311位讲者 杜佳东
上海纽约大学学生
我叫杜佳东,现在是上海纽约大学交互媒体艺术的一位研究员。目前的研究方向是用最新的科技来进行传统的艺术创作。
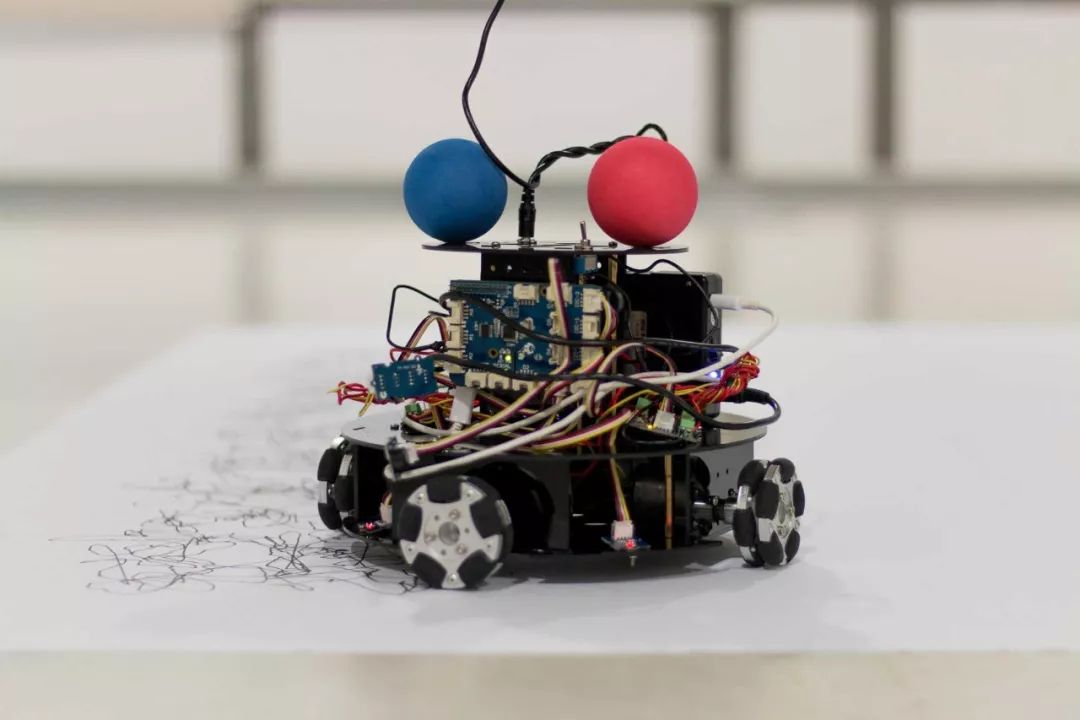
这个机器人,我管它叫Minus E,是一个画画机器人。这是它在画画时的状态。我通过摄像头捕捉到机器人上面的蓝色和红色小球,来确定机器人的位置和方向,进而控制机器人。
机器人上有一只记号笔。由于机器人在画布上面不停地走,这支笔就会跟着它运行的轨迹留下痕迹,最终形成一幅画。

01
既爱画画 又对机器人感兴趣
我想到了做一个画画的机器人
我为什么要做这样一个机器人?
我在六岁的时候就开始使用电脑,很小的时候就已经爱上用电脑来进行艺术创作。
这是我大概九岁时,用windows上的画图软件画的一幅画。
到了初中的时候,我参加了一个机器人工作室,主要研究足球机器人。那是我第一次接触机器人。当时我没有机会去修改这些机器人的代码,因为我们学校在初中是没有编程课的,所以我们不会编程。尽管如此,这一次接触还是让我学到了机器人的工作原理与它的一些逻辑。
当我做毕业设计的时候,我就开始思考,既然自己喜欢画画又对机器人特别感兴趣,那为什么不做一个机器人来帮我画呢?
在做这个东西之前,我做了一些简单的调查,找到了两大类可借鉴的机器人:
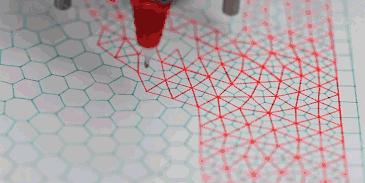
第一类是类似于3D打印机。
大家可以看到,这个机器拿着一只普通的笔,它用的马达是叫步进电机或者步进马达,特点就是定位特别准确,它几乎可以像照片一样还原你想要画的东西。
另一大类的机器人类似于扫地机器人。由于它没有一个具体的定位系统,所以它画的画比较抽象、无规律。有点像Jackson Pollock的风格。
我又想,既然已经有了一些像打印一样特别精确的机器人,又有可以画抽象画的机器人。为什么我们不把二者结合起来?
02
不完美的机器人 也能进行艺术创作
有了这个想法之后,我开始思考如何来做。这就不得不提我在大学期间上过的两门课。
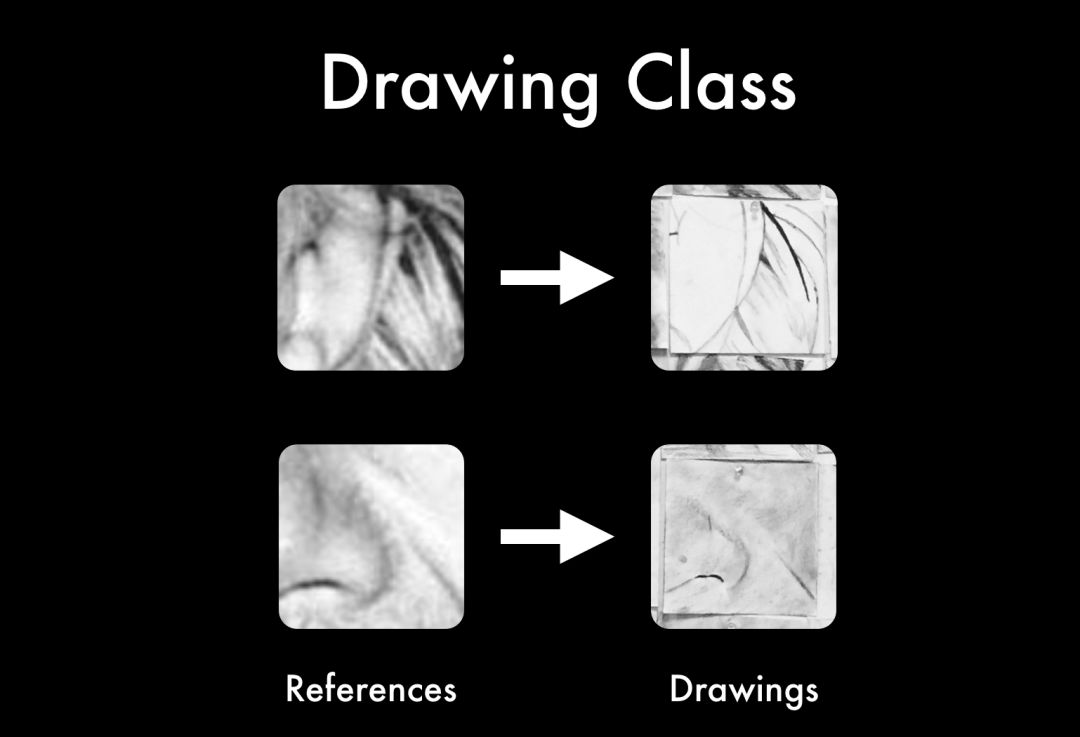
一门是我在纽约留学时上的画画课。这门课的教授给我们每个人发了几张小卡片。卡片上边是他打印好的一些图,它其实是照片的一部分。然后,我们每个人又拿到了一张白色的卡片。教授让我们在这张空白卡片上还原第一张卡片上的图。
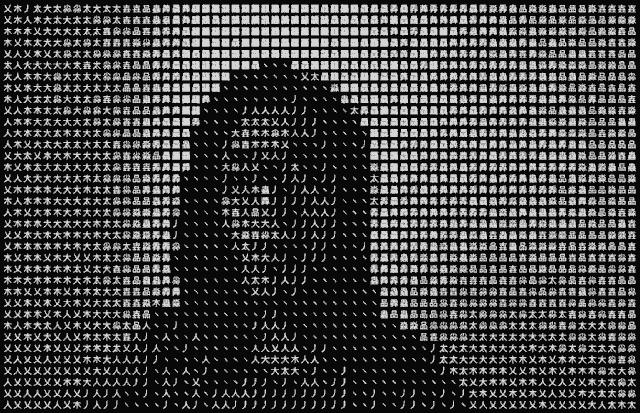
由于每个人画画的水平不同,所以画出来的结果是参差不齐。而且我们完全不知道自己到底在画什么。但是,当教授把每个人画的小卡片拼在一起的时候,大家都能看出来,那就是爱因斯坦。这太令我惊讶了!我们这么多人,画风如此大相径庭,但最后竟然仍旧可以看出是什么图案。
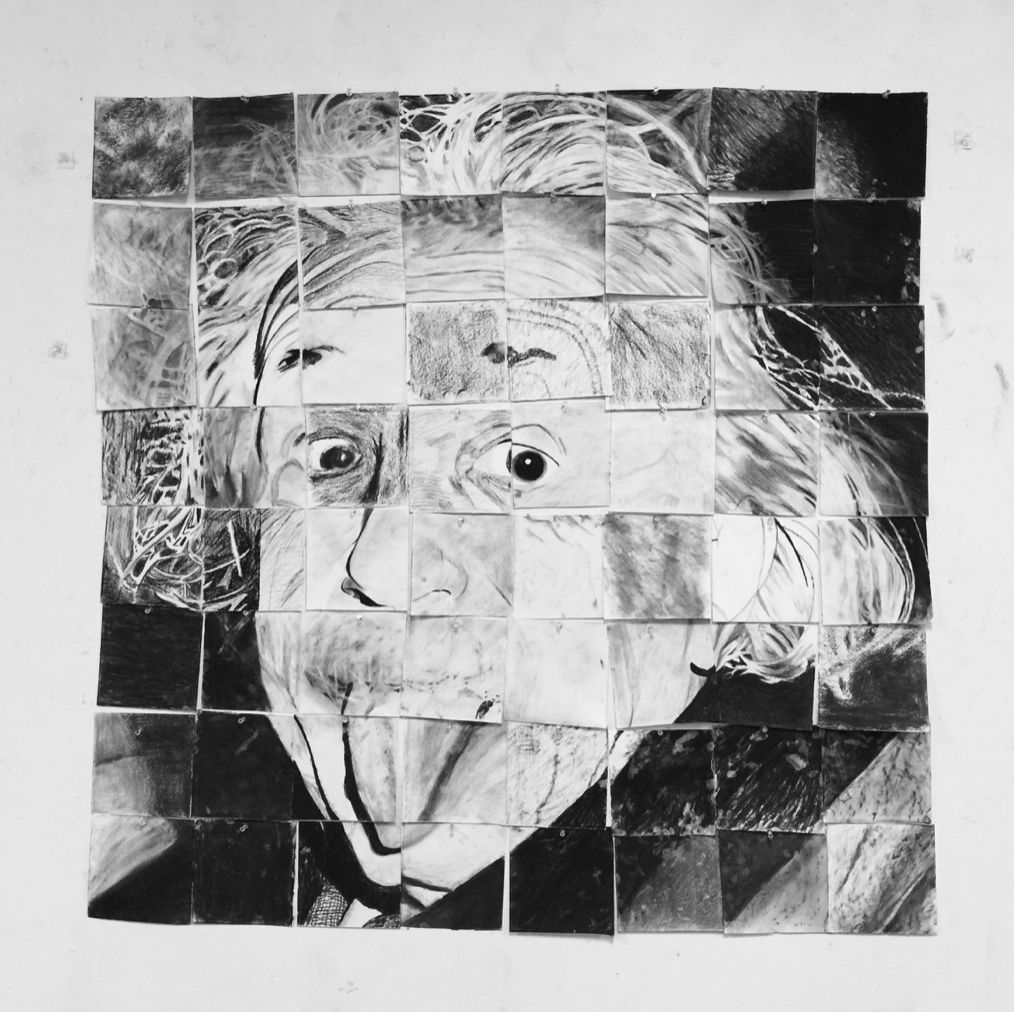
在那节课上,教授介绍了这种网格画法。也就是在画画之前,把一幅画分成很多个小格子,然后一小格、一小格去画。画的时候,尽量不要去思考自己在画什么,只专注于那一个小格。全部完成后,我们就可以看得出来画的是什么。
这种画法其实也不是这位教授发明的,而是一种常用方法。特别是像一些经典的壁画,因为它会布满整个墙面,画家不可能直接进行创作。他必须把墙面分成很多个小格,一个个小格地完成。所以,这种方式其实可以更好地掌握绘画的比例。
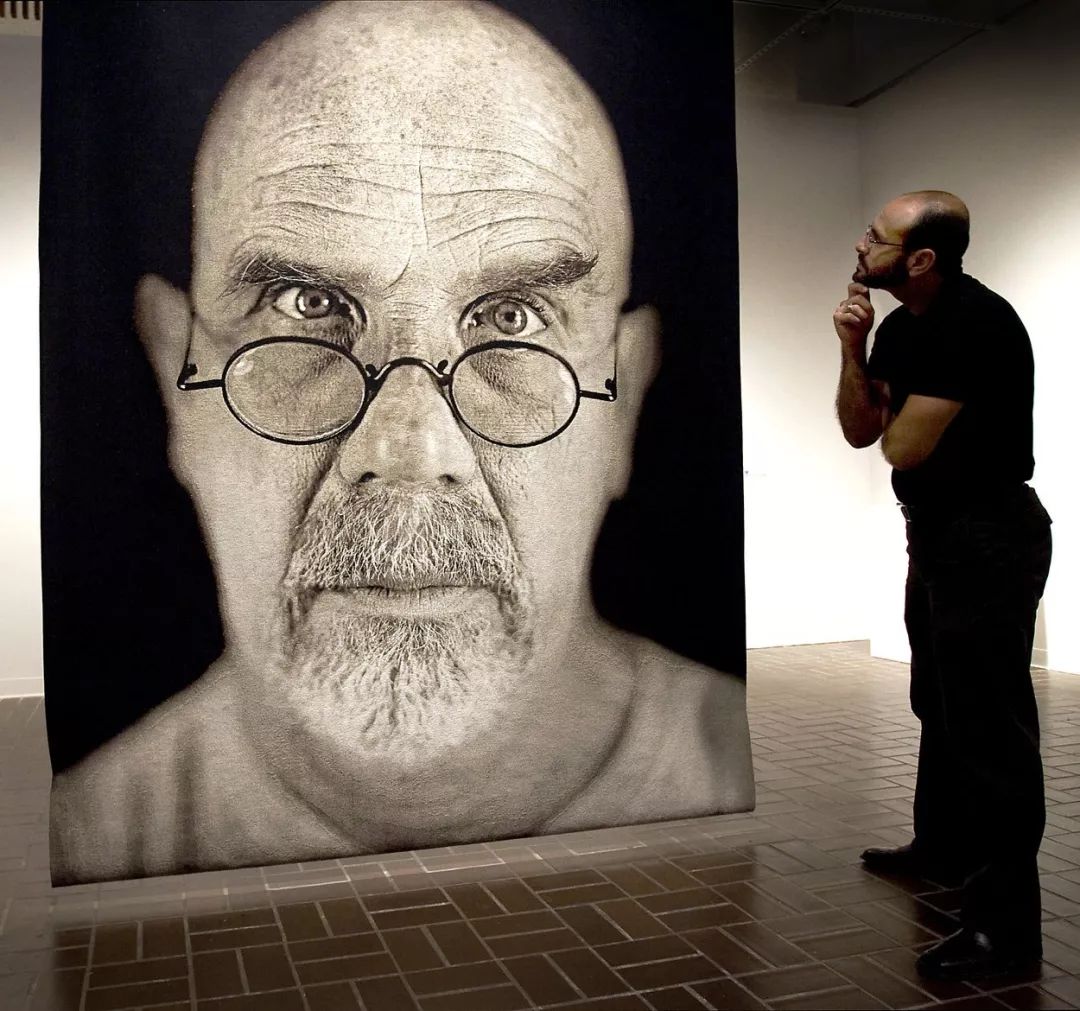
另外一门是我在阿布扎比留学时上的油画课。这门课让我了解到一位叫查克·克洛斯(Chuck Close)的美国艺术家。他年轻时的一些画作被称为“超写实(hyper-realistic)”风格,画得非常非常精细——如果打印在A4纸上,大家完全分辨不出来是画作还是照片。
他后来逐渐发展出了各种各样的风格。其中一种就是每个小格里面都是一个非常抽象的画,但是在每个格子都画完后,大家可以看得出来那是一幅自画像。
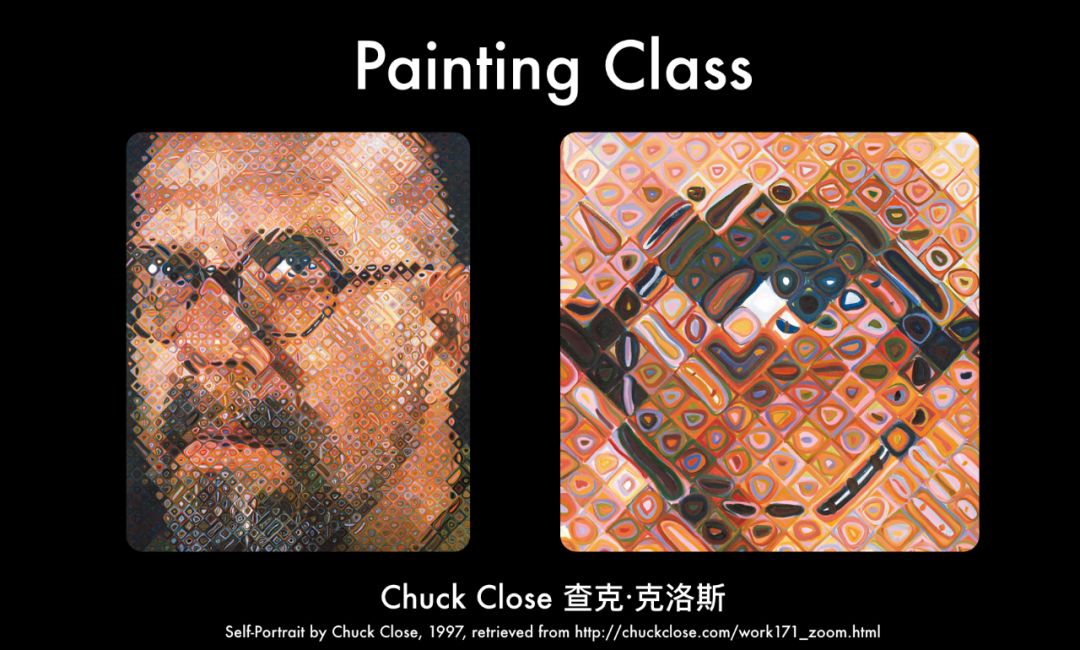
克洛斯在中年时患上了疾病,导致全身多处严重瘫痪,所以当时他已经改成用手直接作画。但他的瘫痪并没有对他本人的艺术创作造成阻碍。
我想做一个并不完美的机器人,就像这位艺术家一样,在身体并不完美的情况下,也能进行创作。于是,我尝试将网格画法引入机器人作画中。

设计这个机器人之前,我做了一个简单的尝试,将一张图分成很多个小格,然后一个个格子去画。我画的时候就是一种涂鸦的形式。这样的随笔一画显然无法准确还原图片。但如果远距离看的话,大家发现它和原图还是有很多相似之处。
然后,我开始设计机器人。我在天花板上装了一个摄像头,一直对准地面上的机器人以及画布。机器人的位置和方向由一蓝一红的两个小球来确定。

大家可以看到,它其实没有能力画一条非常直的线,但这恰恰是我想要的。我不想要一个让它画一条直线,它就会很完美地画条直线出来的机器。
03
机器人的作品也是独一无二的
我把网格画法添加到这个机器人系统中。每一次机器人画画前,我都会给它一张图片,然后系统会把图片转化成低分辨率版本。
由于有摄像头来检测机器人和画布,所以它可以在画布上面创建一个虚拟的网格。每个网格就对应参考图片里的一个像素点。
每个像素点有不同的颜色和深浅,机器人正是根据这些颜色上的深浅来决定在小格子里停留的时间。于是机器人就在这个格子里画画,进行自由发挥。它可以往任意一个方向走,只要不走出这个方格就可以。如此一来,它创作出的每张作品都是独一无二的。
造成每张作品都不同的原因还有很多。比如机器人用的马达是最普通的直流电机,并没有使用步进电机,所以定位并不是很精确。还有,机器人的轮胎也比较容易打滑。另外,我是通过WiFi来联网通信的,信号强弱也会影响机器的反应快慢。
这些原因导致它在创作的过程中有很多的不确定性,但正是这些不确定性导致每幅作品都是独一无二的。
很多人听到机器人画画,就会想:到底我是艺术家,还是这个机器人是艺术家?到底这个作品该归谁?
对我而言,这主要取决于机器人本身的自主能力。我设计这个机器人,虽然它画画的时候是处于相对独立的状态,但大部分的决定还是由我来做的——由我来选择这幅图的分辨率要多少,对比度是要多少。所以,它就是我进行艺术创作的一个工具而已。
最后,我希望大家一起通过这类科技手段来进行艺术创作。因为我觉得艺术创作并不属于少数人,而应该属于大多数人,属于每一个人。
评论