
文|新智元
编辑|大明
像MIT计算机科学与人工智能实验室(CSAIL)这样的即年轻,又超级聪明的学生在繁忙的课业和研究之余会干点啥呢?事实证明,与世界各地的同龄人一样,他们也喜欢把时间“正确地浪费”在一些玩起来就停不住的比赛上,虽然这种比赛其实真的没什么用。
也许这就叫“浪费时间的正确方式”吧。
这种比赛的形式其实取决于发起人的脑洞大小,所以经常变来变去。比如这个月,一项名为Bottle Cap Challenge,也就是“瓶盖挑战”的比赛火遍了社交网络。
本来这个比赛是为真人准备的,要求参赛者把自己开瓶盖的帅气姿势拍下来给大家看(通常都是酷酷的侧旋踢)。到目前为止,已经有很多各界名人参赛,包括格斗界扛把子康纳·麦格雷戈,硬汉演员郭达·斯坦森,歌后玛丽亚·凯莉和动作天王尚格云顿等。
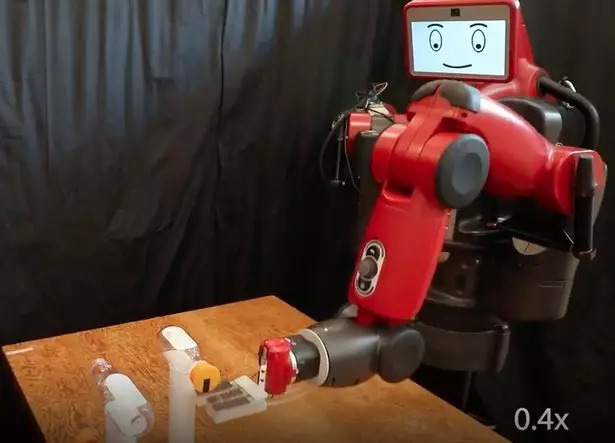
不过到了MIT这儿,事情就很不一样了。MIT的学生们准备让自己开发的机器人Baxter也参加这个比赛。通过一些整洁的镜像技术,让Baxter模仿人类的动作,提升手臂,同时,添加必要的旋转动作,将瓶盖从瓶子上旋开。
完美复制人类动作,机器人成功挑战“开瓶盖”!
“我们对这个平台做了两个重要的补充。”麻省理工学院CSAIL研究生Joseph DelPreto表示。“我们打造了自己的柔性抓手,抓手由柔韧的橡胶制成,能够像瓶盖一样弯曲。抓手上还有传感器,可以让机器人确定目标的形状,以便更好地操纵。我们基于用户的二头肌上的肌电图(EMG)传感器打造了一个机器人的控制系统,传感器可以实时监测肌肉活动。
利用这套系统,开发了能够连续处理这些肌肉信号的算法,以检测人的手臂水平高度的变化,并让机器人原封不动地复制人类的动作,或者遵循非语言式的命令。我们使用Baxter机器人完成这项任务,但实际上,使用肌肉信号的机器人算法也适用于任何其他类型的机器人。”
Baxter机器人的这一尝试展示了MIT实时协作机器人系统的巨大潜力。
“该系统使用肌肉信号,可以在物理任务中生成更自然的人机交互,”DelPreto说道。“我们通过各种团队升级活动和任务对机器人进行了测试,比如拾取物品和进行基本的装配。
这一技术最终可能能够走入工厂甚至是家庭,让机器人成为更有效的生产或生活上的好助手。未来,我们计划给Baxter机器人增加更多的可穿戴传感器以及更多的学习功能,我们希望能够它可以解决更复杂的操作任务。
这次社交媒体上的“开瓶挑战”正是一个有意思的例子,大家的热情很高,但我们的目标可不只是开个瓶盖而已!”
参考链接:Digital Trends
评论