

记者 |
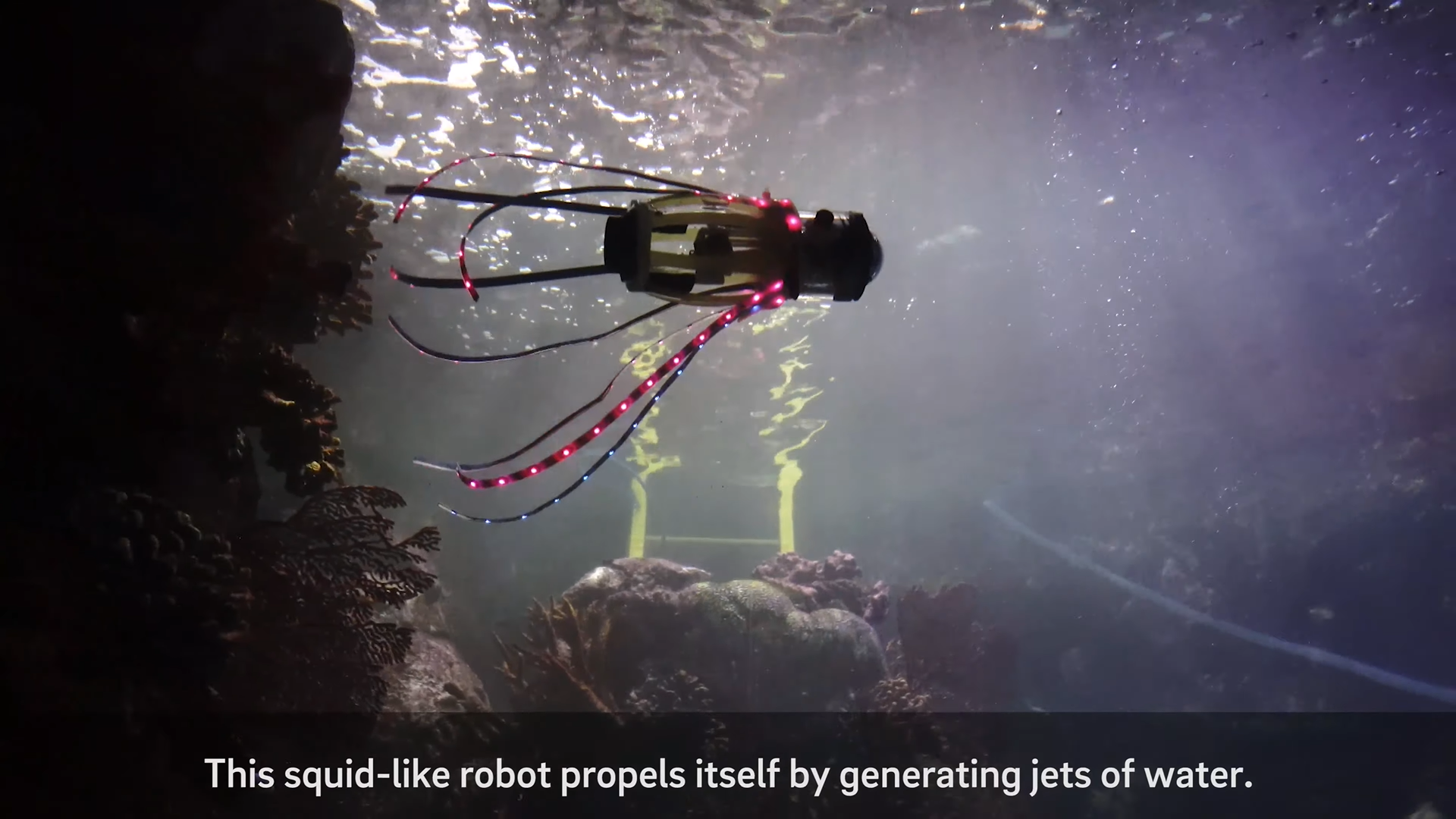
一款高度仿真的鱿鱼机器人全新面世。
日前,美国加州大学圣地亚哥分校的研究人员,开发了一款外形酷似鱿鱼的仿生机器人。
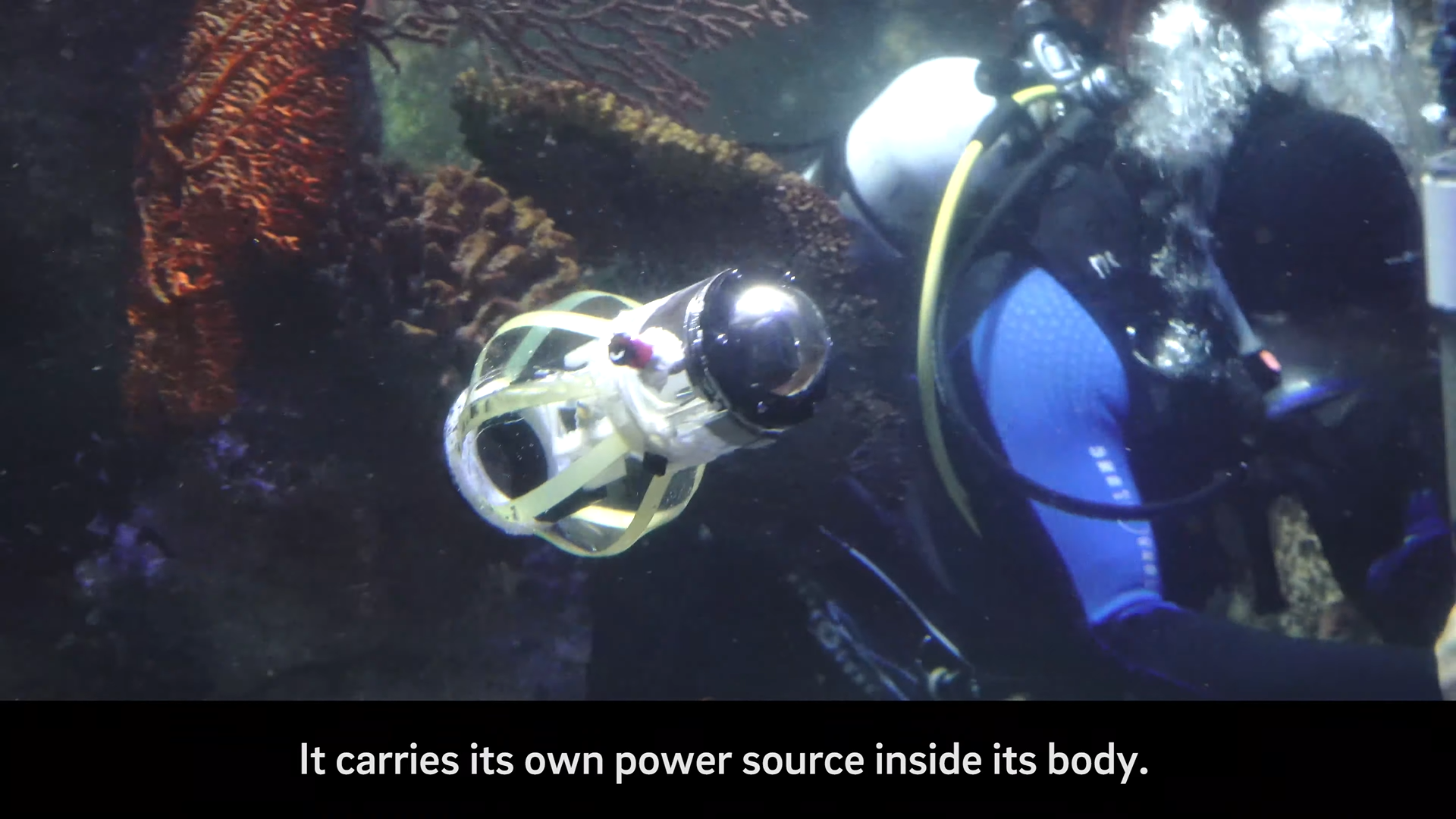
据研究人员介绍,该款机器人外形柔软,高度模拟鱿鱼喷水前进的原理,体内携带自己的电池系统,同时还配备了照相机等传感器,可用于水下探测作业。
加州大学圣地亚哥分校官网的文章中指出,进行水下探测时,使用外形柔软的机器人可以保护鱼类和珊瑚礁免受伤害,但这类外形柔软的机器人往往操作起来困难,行进速度也十分缓慢。
为了解决这一问题,加州大学圣地亚哥分校的研究团队选择了鱿鱼等头足类动物当作机器人模型。在所有的无脊椎动物中,鱿鱼的行进速度是最快的。

头足类动物没有传统软体动物的足,运动器官被称作触手,拥有高级的神经系统。典型的头足类动物包括章鱼、鱿鱼和乌贼等。
Michael T. Tolley是这项研究的资深研究人员,同时也是加州大学圣地亚哥分校机械和航天工程系教授。他表示,研究团队完全复刻了鱿鱼在高速游动过程中的一些关键特征。
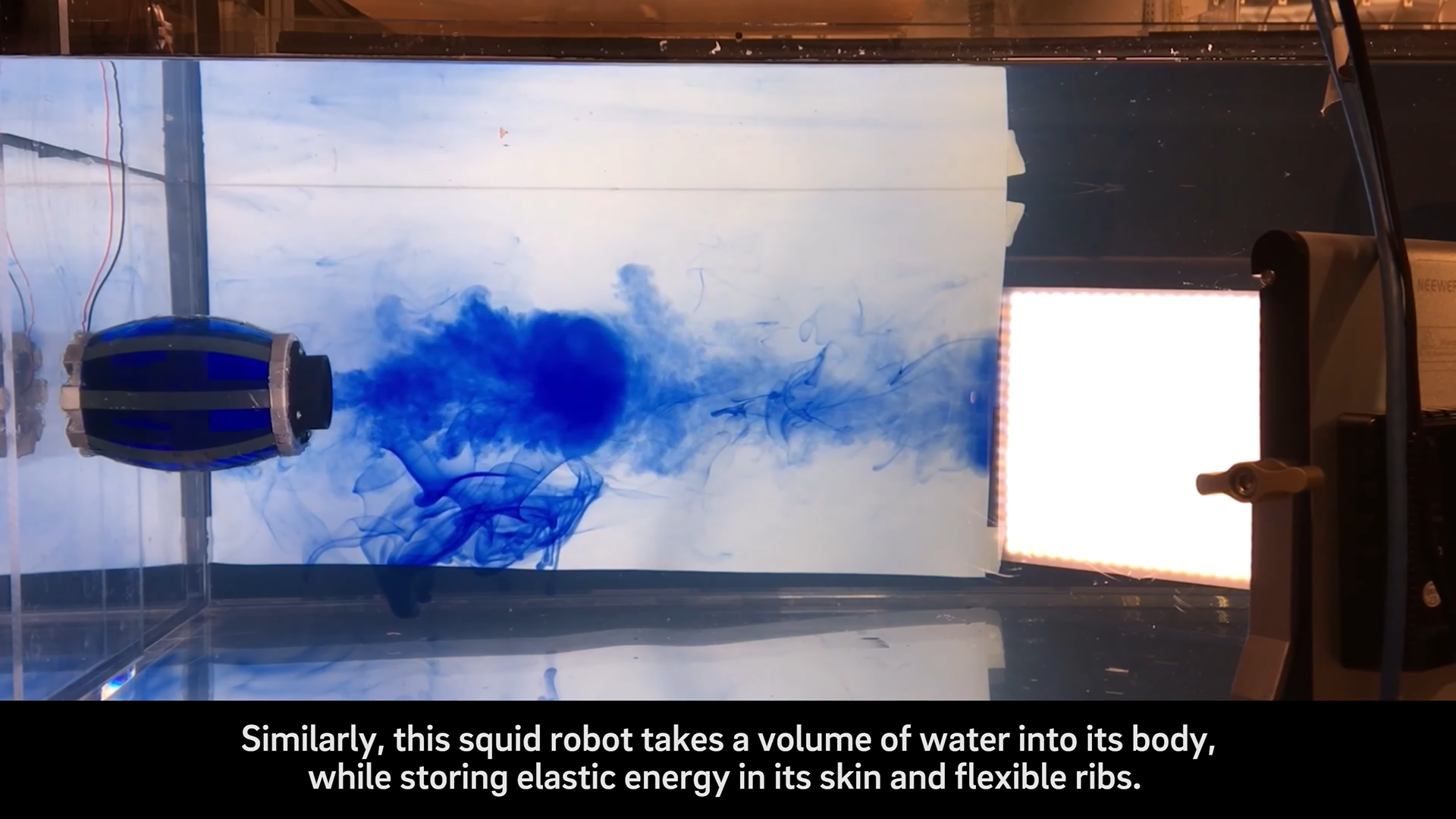
鱿鱼机器人可以将大量的水吸收进腹腔内,再通过积压外表面和内部的骨骼,像鱿鱼一样将水流压缩喷出,利用反向推动力来快速前行,大大提高了水下行进的效率。

静止不动时,鱿鱼机器人的外形很像一只纸灯笼,两侧柔韧的骨架连接着上下两个圆盘。
其中一个圆盘上可以配备防水摄像头或其他类型的传感器;另一个圆盘上装有喷嘴,可以实现吸入水流再向外喷出的功能,它还可以通过调整喷嘴的方向,控制机器人前进的方向。
该鱿鱼机器人主要由丙烯酸聚合物等软性材料制造而成,同时搭配了部分3D打印和激光切割出来的坚硬部件。
在最新出版的《Bioinspiration and Biomimetics》期刊上,研究团队详细地介绍了他们的工作进展。
研究团队在加州大学圣地亚哥分校的一个水族馆里进行了测试。测试的目的之一,是为了更好地解决机器人内部电池和相机等电子元件的防水问题。
测试数据显示,该机器人水下行进速度约为每秒18-32厘米,快过绝大多数软体机器人。
仿生水下机器人,已成为科学家的一大重要研究领域。
去年,加州理工大学的研究者,提出了一种模仿章鱼的软体水下行走机器人。该机器人可以监测水流方向,通过改变身体形状来借助水流的流体特性,大幅提升它在水底的运动速度。
今年4月,德克萨斯大学达拉斯分校的研究人员约纳斯·塔德塞(Yonas Tadesse)等人,研发了一种可快速垂直游动,且有一定载荷的仿生水母软体机器人。
该仿生水母软体机器人的运动机制,是通过向下喷射流体产生反作用力,推动其在水环境中进行垂直方向上的运动。
评论