
文|阿尔法公社
自动驾驶的时代终将到来,那么在未来的自动驾驶领域,谁将成为那个通吃的赢家?是主机厂,自动驾驶技术商?还是特斯拉?现在答案还未揭晓,但我们可以去发现趋势。
现在有几十家公司,例如传统厂商,大型科技公司和初创公司都在用各种各样的方式探索自动驾驶汽车技术。显然,这些公司和方法不可能都成功;但我们可以从中学习和探索:在自动驾驶领域,会不会出现赢家通吃的局面,哪些厂商或路径有机会达到。在这个行业是否也存在网络效应,是像互联网行业一样,有一两家巨头成为最后的赢家,还是会有五到十家公司进行惨烈的竞争?

自动驾驶领域,玩家众多,成分复杂。
这些问题很重要,因为搞清楚它们,就有可能知道未来汽车行业的趋势和格局。未来的景象是巨型的汽车主机厂像购买ABS模块一样从供应商中购买成熟的自动驾驶系统,还是会有一个自动驾驶厂商或新造车厂商像微软和英特尔(它们改变了PC行业的格局)一样改变汽车行业的格局?
自动驾驶技术的设备商们有优势么?
首先,用于自动驾驶的硬件和传感器(也包括汽车电子的传感器)将成为可替代性较强的商品。就像当初的LCD屏幕一样,它们可能还需要很多科学和工程方面的改进才能成熟,但一旦成熟之后,却不具有不可替代性,它们可能会拥有很强的规模效应,却没有网络效应。例如,现在激光雷达的成本可能是5万美元,当它未来的成本降到几百美元时,某一个头部制造商可能成为细分市场的赢家,但因为没有网络效应,它对于整个格局不会产生影响。就像Sony虽然制造了最好的图像传感器(它是苹果和很多头部手机厂商的供应商),但这并不能帮助Sony的智能手机业务变得像苹果一样强。

3D激光雷达成像
另一方面,自动驾驶领域可能不会像PC或智能手机那样出现一个具有统治力的第三方软件开发者生态系统。Windows压倒了封闭的Mac,Android打败了Windows Phone,这是因为他们提供了一个平台来供开发人员开发自己的应用,并形成一个良性循环。而这个循环在自动驾驶系统中可能不会存在,因为你不会因为某一个软件来购买汽车,而是会有一个综合的购买决策。
对于自动驾驶软件系统,它会在整个城市范围内进行优化和路线选择,这意味着我们应该将所有具有自动驾驶能力的汽车当成一个整体,而不仅仅是一辆自动驾驶汽车,或一个“自动驾驶出租车”车队。网约车模式毫无疑问具有网络效应,但是随着自动驾驶技术的加入,它将变得更加复杂(自动驾驶技术可能会使网约车的乘车成本降低四分之三或更多)。自动驾驶网约车车队将动态地预先定位他们的汽车,并且这些车以及可能的其他所有汽车都将实时协调其路线,以实现最大效率(也许跨车队),从而避免所有车都在同一时间选择同一条最优路线,进而产生冲突。
Windows+Office让微软成为PC时代赢家
从技术角度来看,这三个层次(驾驶,自动的路线选择和优化以及按需用车分配)在很大程度上是独立的。Uber可以使用通用汽车的自动驾驶汽车,而这款汽车可能用的是Waymo的自动驾驶技术。但显然有一些厂商希望将这些层次的技术捆绑在一起发挥作用,例如特斯拉就计划把整车、自动驾驶和网约车业务都吃掉;而Uber则不会要求你只使用它自己开发的自动驾驶系统。但是,尽管微软利用Office和Windows的捆绑,形成了网络效应并成为了PC时代的赢家,但一个小型OEM商坚持要求你使用它的自动出租车服务,就像苹果在1995年坚持要求你购买Apple Works而不是Microsoft Office 。我怀疑可能会有更中立的方法,如果我们对所有车辆进行跨城市协调,甚至在交叉路口处进行车辆与车辆之间的通信(这种情况应该是存在的),那么可能会需要某种公共层(尽管我始终认为是去中心化系统更好)。但是这些预见毕竟只是猜测,就像你在1900年预测现在的交通拥堵情况一样。
地图和行驶数据将产生网络效应
我们可以讨论自动驾驶领域的关键网络效应会在哪里产生。这可能会与硬件,传感器和软件有一定关联;但更与一些重要的数据有关。对于自动驾驶,有两种数据很重要:地图和行驶的数据。
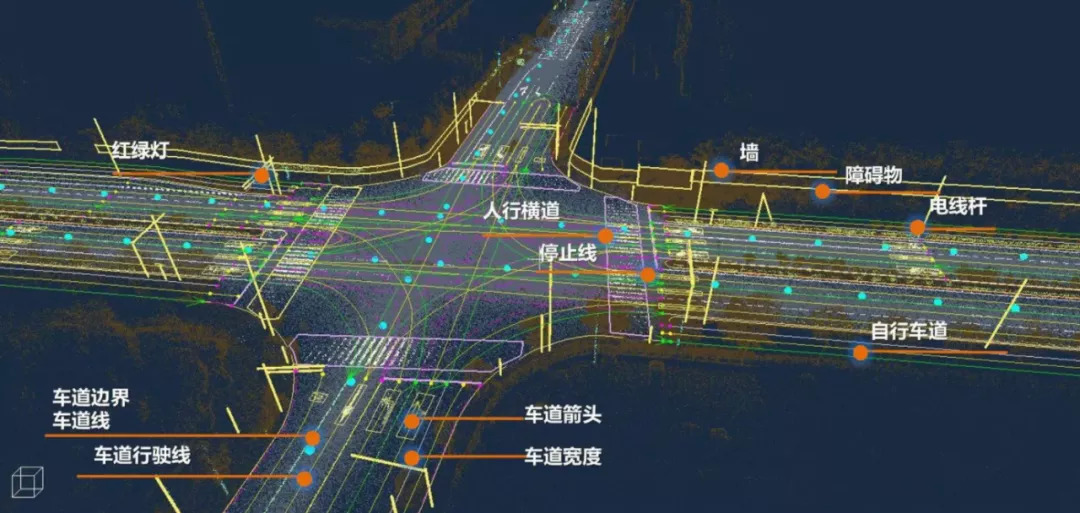
高精度地图
首先是地图。人类的大脑在不知不觉中会不间断的实时处理传感器(眼睛、耳朵、皮肤触觉)数据并建立我们周围世界的3D模型;这样,当我们穿越森林时,就不会被树根绊倒或将头撞在树枝上。在自动驾驶中,这被称为SLAM(同步定位和地图绘制)—我们绘制周围环境的地图并在其中定位自己。显然,这是自动驾驶的基本要求:汽车需要利用各种传感器搞清楚它在路上的位置以及周围有什么特征(直道,弯道,路肩,交通信号灯等),并且还需要弄清楚其他车辆与它的相对位置以及行车速度。
在真实道路上实时执行这种操作仍然非常困难。人类可以用视觉和声音定位,但是仅从成像(尤其是2D成像)中提取周围环境的数据并生成足够精确的3D模型仍然是一个尚未解决的问题:机器学习可以提高这种可能性,但是现阶段仍然没有足够的能力实时的做到高精度的自动驾驶。这就是为什么几乎所有的自动驾驶项目都将成像与360度激光雷达结合在一起:每个传感器都有其局限性,但是通过将它们结合起来(“传感器融合”),你可以获得完整的图像。在未来的某个时候,有可能仅凭成像就能建立你周围的世界模型,但是使用更多的传感器可以更快地到达那里,虽然需要等待这些传感器的成本和尺寸在未来达到使用的需求。
如果激光雷达是达到SLAM的一种捷径,那么另一个更有可行性的是使用预建地图。你可以预先测量所有道路(不需要实时的处理所有数据,建立道路模型),然后将完整的地图安装在任何自动驾驶汽车上。有了高精度地图,自动驾驶汽车就不必在高速行驶的同时还要实时处理所有数据并识别各种弯道、交通信号灯或各种预期外的杂物;而是可以在高清3D模型上发现关键地标并快速将自身定位在道路上。因此,自动驾驶汽车可以使用摄像头和激光雷达,并将它们感知到的图像与预先构建的高精度地图进行比对,而不必从头开始,从而能够让定位的速度和精度都有提升。
地图具有网络效应。当任何自动驾驶汽车沿着预先设计的道路行驶时,它既会将道路与地图进行比较,又会更新地图数据:每一台自动驾驶汽车都同时可以是一辆测试汽车。如果你已售出500,000辆自动驾驶汽车,而其他人仅售出10,000辆,则你的地图将更新得更频繁,并变得更准确,因此你的自动驾驶汽车将更少遇到全新的,出乎意料的路况和意外。你售出的汽车越多,它们的自动驾驶性能就越好—这正好符合网络效应的定义。
从长远来看,这里的风险是,就像自动驾驶汽车可以在没有激光雷达的情况下做到SLAM一样,它也可以在没有使用高精度地图的情况下做到SLAM—毕竟,人类也可以这样做。目前尚不清楚不使用高精度地图在未来是否会成为主流,但目前看来,已经有不少具有自动驾驶功能的汽车被销售,也有很多自动驾驶测试车辆在路上跑。
地图是数据中的第一个具有网络效应的,而下一个是自动驾驶汽车在了解周围环境后的行为数据。在一个空旷的道路上行驶,或者在一个全是自动驾驶汽车的封闭道路上行驶是现在自动驾驶汽车的主要场景,但是弄清真实道路上其他驾驶员将要做什么以及如何做是则完全是另一个问题。
机器学习是自动驾驶进行突破的重要动力:机器学习不使用复杂的规则来解释人、汽车、道路的行动方式,而是使用数据(数据当然越多越好)。你收集的有关真实驾驶员在现实世界中的行为和反应方式的数据越多(可以通过测试车或学习特斯拉),你的自动驾驶系统软件就能更好地理解周围的情况,并且更聪明的规划和反应汽车下一步该做什么。就像地图一样,在发售前,你的测试车们会尽可能多的收集这类数据,发售后,你售出的每一辆车都会将这些数据收集并返回。因此,就像地图一样,你售出的汽车越多,汽车的自动驾驶系统就越强,这也就能达到网络效应。
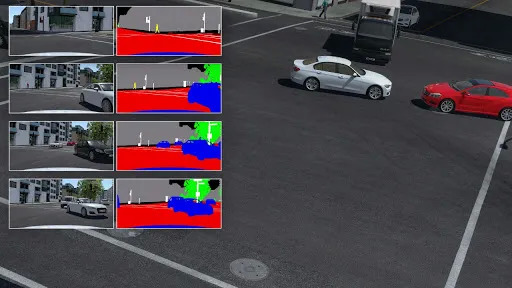
在对自动驾驶系统的模拟训练中,行驶数据还能带来其它的优势。例如如果要解决以下问题:“如果发生X,我们的自动驾驶系统软件将如何反应?”,解决的方法之一是专门派一辆自动驾驶测试车,整天在城市附近的道路行驶,以查看它对碰巧发生的这种事件作何反应。但问题在于,这不是受控试验,这些随机的情况在现实中发生的概率是非常低的,所以测试的效率也会很低。因此更好的方式是,利用仿真软件对各种各样的情况进行试验,例如你可以反复测试“激光雷达会检测到那辆卡车吗?”这样的情景,而你也可以将测试的数据和情况与真实的路况数据进行比对。

因此,存在间接的网络效应:你拥有的真实路况的驾驶数据越多,你的仿真模拟就越准确,你的自动驾驶系统软件就越强大。仿真还具有明显的规模优势,当你拥有更强的算力,更多的工程人员,尤其是有经验的工程人员,那么你的系统也会越强。例如,加入Google显然为Waymo带来了优势:据报道,加入Google前,Waymo每周可行驶25,000个“真实”的自动驾驶里程,而加入Google后,则平均每周可以测试1900万英里。

所以,可以说特斯拉在地图和驾驶数据方面均处于领先地位:自2016年底以来,特斯拉在量产车上搭载了自动驾驶组件,这包括八个摄像头(它们提供了近360度的视野),以及前向雷达和超声波传感器。这些传感器都可以收集驾驶员真实的行为数据,并将其发送回特斯拉。问题在于,由于只有前向雷达,特斯拉建立世界模型的数据大部分来自摄像头的成像。但就如前文所说,这样的数据组成的世界模型,有其局限性。显然,特斯拉在走一条与依靠激光雷达的自动驾驶厂商们不同的道路;它将赌注都下在了计算机视觉的开发速度上,而不再等待未来可能出现的廉价/实用的激光雷达。而这同时意味着,计算机视觉软件将不得不解决更难的问题,因此带来了更大的挑战,成熟的时间也会更慢一些。如果未来激光雷达在较短的时间内成熟(更小,更便宜),而特斯拉主要基于计算机视觉的自动驾驶系统不能在同一时间段拥有相应的性能,那么它在前期积累的优势可能被消弭,结果如何,我们拭目以待。
谁将掌握数据,数据越多越好么?
因此,能够产生赢家通吃效应的网络效应,体现在:行驶数据和地图中。这带来两个问题:谁来获取数据,以及你需要多少数据?
数据的所有权是一个有趣的权力和价值链问题。很明显,特斯拉计划自己构建所有重要的自动驾驶技术部分,并将其安装在自己的汽车上,所以它拥有完整的数据。而一些OEM厂商认为,因为他们的汽车和客户的关系,所以他们自己应该拥有的数据和其分配权,而不是给任何技术合作伙伴的。我不确定销售GPU、摄像头或激光雷达这些“商品”的厂商是否希望保留数据;但那些开发成套自动驾驶系统的公司需要拥有数据,因为这就是它的工作方式。如果它们不能把数据投入到系统中去,它的技术就无法得到改进。这意味着OEM为供应商创造了网络价值,而自己却没有得到任何价值,除了更好的自动驾驶性能。这就是PC或安卓OEM厂商的处境:他们通过同意在产品中使用软件来创造网络效应,这使得他们的产品得以畅销,但他们的产品已经近乎变成了商品(可替代性强),网络价值归科技公司所有。这是一个循环,大部分价值都归厂商,而不是OEM。当然这也是大多数汽车OEM厂商想自己做自动驾驶技术的原因:他们不想落得像康柏电脑那样的下场。
这让我想到最后一个问题:你到底需要多少数据?随着你添加更多的数据,系统会无限制的变得越来越好,还是说有一个S曲线—是否有一个点,达到这个点之后,添加更多的数据会有递减的回报?
那就是—网络效应有多强?
对于地图来说,这是一个很明显的问题。你需要多大密度的布置测试车辆,用多高的频率测量和更新数据,地图的数据精度才足够高。每一个参与者最低的市场份额是多少,整个市场给了参与者多少空间?最后这个市场是会有十家公司,还是只剩得下一两家。是否可以有一群二线OEM厂商,将它们所有的地图数据集中和整合起来?这个生态不像是消费软件生态系统—RIM和诺基亚不能把黑莓和S60用户群集中起来,但你可以把地图集中起来。这是一个进入的障碍还是一个进入的条件?
这个问题也适用于行驶数据,事实上是适用于所有的机器学习项目:随着你添加更多的数据,收益会越来越少,曲线在什么时候会变平,有多少人可以得到这么多的数据?对于一些互联网应用,比如搜索,数据带来的改进似乎确实是无限的,它的结果总是能变得更相关。但对于自动驾驶,从准确度来说,似乎确实应该有一个上限—如果一辆自动驾驶汽车可以在意大利那不勒斯很好的运行一整年,那它应该也能在其他地方运行,那么还有多少需要改进的地方?在某些时候,你实际上就可以说它具有了足够好的能力。所以,网络效应意味着,如果你有更多的用户,你的产品就会变得更好,但在产品停止明显改善之前,你需要多少用户?你需要卖出多少辆具有自动驾驶系统的汽车,你的自动驾驶的能力才会和市场上最好的汽车一样好?有多少公司有能力达到这种水平?而与此同时,机器学习本身也在快速变化,能帮助你的系统达到完全自动驾驶能力的数据量或许是在变少的。
成为普通供应商还是Waymo/特斯拉一家独大?
前文一直在说更好的自动驾驶,那么“更差”的自动驾驶技术意味着什么?它是意味着乘客有可能死亡,还是仅仅代表汽车在面对复杂路况时行驶起来不太顺畅;需要人类驾驶员来接管?
我猜测,随着未来自动驾驶从Level 4进化到Level 5,手动控制的比例会越来越少。Level 5的自动驾驶不会一下普及,而是会阶段性的被使用,而随着它的普及,手动干预的比例会越来越少,直到最终被隐藏或移除。Level 5自动驾驶的普及也会和各国的法律有关,也许在莫斯科或那不勒斯使用Level5之前,法律更友好的德国会率先使用。这将意味着数据在网络规模上被收集,并在完全自主之前就被使用。
我们现在还不好确定所有这些问题的答案;很少有业内人士估计Level 5的自动驾驶在5年内会实现,大家都倾向于这个时间会是10年后。他们有一些假设,这些假设对于未来的汽车行业将产生巨大的不同影响。有一种极端的假设是,因为没有建立较强的网络效应,最后出现5-10家拥有可行自动驾驶系统的公司,在这种情况下,汽车行业将把自动驾驶作为一个组件购买,价格就像今天的ABS、安全气囊或卫星导航一样。这仍然会给行业带来变化,自动驾驶的普及会让网约车行业的乘车成本至少下降四分之三,这将使许多人重新考虑是否应该买自己的车。而与自动驾驶技术同步进行的电动汽车技术,则使汽车中的运动部件数量减少非常多,这会改变工程动力、供应商和电池制造商的进入壁垒。但是行业里不会出现手机行业里Android那样的玩家。在另一个极端假设,Waymo或特斯拉那样的厂商会因为强网络效应成为赢家,而整个行业的面貌将与现在大不相同。
本文由阿尔法公社综合编译自投资人、分析师Benedict Evans的个人博客。
评论