

电影《超能陆战队》(Big Hero 6)的主角小宏(Hiro Hamada)制造出的神经控制微型机器人令人印象深刻,在影片中似乎无所不能,拖动一辆汽车更是不在话下。这一虚幻情节竟在美国斯坦福大学的仿生学和高灵敏操控实验室中实现了,总重量只有3.5盎司(约合99.22克)的6个微型仿生机器人拉动了一辆重达3900磅(约合1.8吨)的汽车。uBots团队将他们的这项最新成果称为“microTug”机器人。

uBots团队表示这项成果的秘诀是仿生学,这一看似违背常理的机器人设计灵感取自于以团队合作的方式移动巨大物体的蚂蚁,也受壁虎的粘足启发,这项新成果将仿生学推向了一个新的发展方向。

uBots团队长期致力于探索微型机器人设计中的阻力极限,最新成果“microTug”机器人能够拉动自身重量上千倍的物体,也能够像壁虎一样漫步在垂直表面上。uBots团队这项最新成果也是建立在此前的研究成果之上的,uBots此前的实验就设计出了能够爬墙和拖动重物的机器人,但这次实验中的不同之处就在于,微型机器人学习了蚂蚁的合作精神。
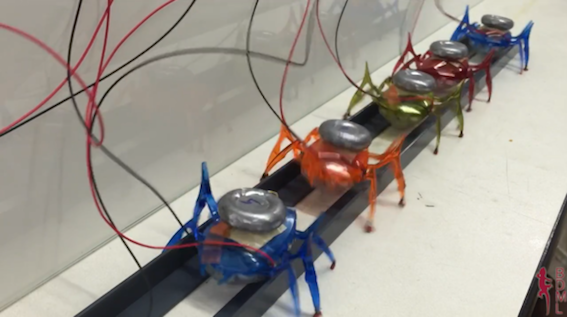
然而,uBots团队也不仅是简单复制大自然的理念,这项成果让蚂蚁也相形见绌。个体重量连半盎司都不到,远比其他拖车机器人轻盈,协同工作的六个微型机器人成功拉动了一辆1.8吨的的汽车,这相当于六个人拖动了一个埃菲尔铁塔和三个自由女神像。

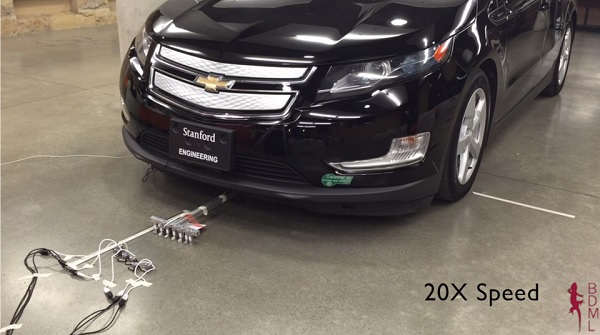
“考虑到蚂蚁整个团队的动态交互,而不是个体,我们得以打造出‘microTug’机器人团队,就像蚂蚁一样,虽然个体都很强大,但却以团队的形式工作。”参与撰写该项目研究报告《齐心协力:微型机器人团队的大负荷分配原则》的研究生David Christensen(视频中被拖动的车是他的)说道。上个月, Christensen先生与另一个研究生Srinivasan Suresh、研究员Katie Hahm、机器工程教授 Mark Cutkosky联合撰写了这项报告,具体内容将在今年5月于斯德哥尔摩举行的机器人与自动化国际会议上公布。
uBots团队的研究焦点并不专注于像足球运动员完成阻截或投掷那样的惊人强力,他们更关心顺利同步微不足道的力量应用,实际也证明,微型机器人缓慢的协同工作的效率超出想象。该团队观察到,蚂蚁抱团行动时,团队中的每一只蚂蚁都只同时使用六条腿中的三条腿,合作力量得以显著提高。微型机器人以相同的工作原理(不同的是以轮子),能够召集500牛顿的力。它们受壁虎脚趾启发而设计的具有粘性的轮胎使得在负重的同时也能轻松地与地面分离。
Christensen先生表示,这一惊人的成绩要部分归功于受壁虎脚趾启发所得特殊粘合剂的使用,“这些微型机器人既可以移动地十分快速,也能通过使用可控粘合剂将相互作用力应用于拖动远重于自身的物件。”斯坦福大学的一项早期研究显示,“这一粘合剂使得这些自动机器人得以在各种常见的表面上,在没有复杂的基础设施的情况下完成拖动重物的任务。”
如果你还想进一步了解“microTug”机器人,请观看以下视频:

评论