

实习记者 | 马悦然
中国研发出的软体机器人创造了新的世界纪录。
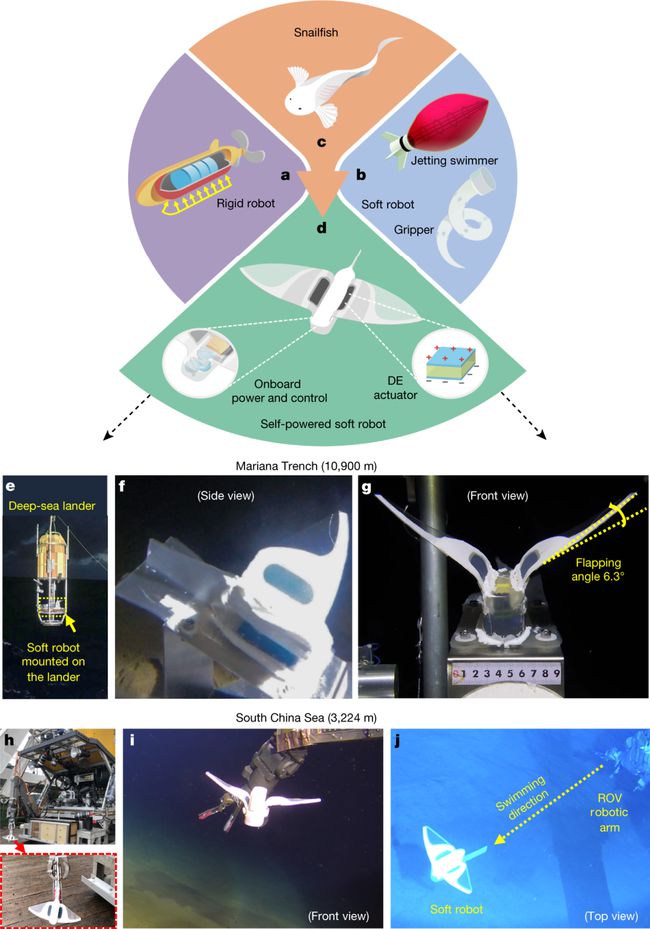
据央视财经6月初报道,中国研发出的软体机器人在太平洋马里亚纳海沟完成测试,成功突破了万米级深潜,刷新世界纪录。
该报道称,浙江大学航空航天学院的李铁风教授团队联合之江实验室,成功研制了无需耐压外壳的仿生软体智能机器人,并于2019年底首次在马里亚纳海沟实现了自主游动。
这项研究成果作为封面文章,刊发在今年3月4日的国际顶级期刊《自然》。

由于地处板块俯冲地带,马里亚纳海沟的海底地质运动非常活跃,海沟深处水压高、完全黑暗、温度低、含氧量低,是公认的地球上环境最恶劣的区域之一。

李铁风团队研发的软体机器人,在该海沟10900米处进行测试。在2500毫安时单节锂电池的驱动下,机器人按照预定指令拍动翅膀,每秒自驱动一次,扑翼运动长达45分钟,试验各项测试数据达到了预定目标。
此次测试是人类研制的软体机器人自驱动试验在马里亚纳海沟创下的新纪录,也是中国研发软体机器人首次突破万米级深潜。
在如此深的海底,静水压高约110兆帕,接近于1100个大气压。过去的深海机器人,通常采用高强度的金属外壳或压力补偿系统来保护自身不会压碎。
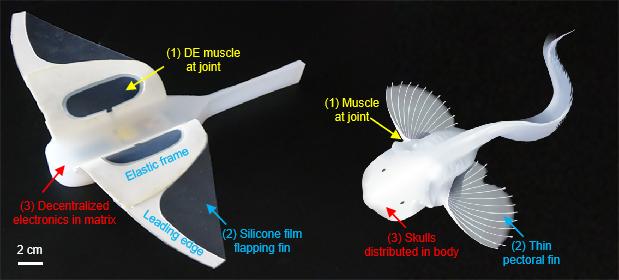
浙江大学航空航天学院官网显示,李铁风团队研发的仿生软体机器人,由软体人工肌肉驱动一对翅膀状的柔性胸鳍,通过节律性扑翅实现游动。
此外,控制电路、电池等硬质器件,被融入集成在凝胶状的软体机身中。通过设计调节器件和软体的材料与结构,使得机器人无需耐压外壳,就可以承受万米级别的深海静水压力。
这款仿生软体机器人的设计,受到深海狮子鱼的启发,形状也类似一条深海狮子鱼,长22cm,翼展宽度28cm,约为一张A4纸的长宽。
科研团队表示,通过对深海狮子鱼的结构分析,发现深海狮子鱼的骨骼细碎状地分布在凝胶状柔软的身体中,有助于其在高压力环境下的生存与活动。
因此,科研团队采用了“以柔克刚”的策略,使机器人实现了适应超强压力而保持结构功能完整。
仿生软体机器鱼在深海实现驱动,需要解决的一大问题是,如何有效避免高分子材料在高压和低温时电驱动能力的衰减。
浙江大学航空航天学院官网显示,为此,李铁风团队与浙江大学化学工程与生物工程学院罗英武教授课题组合作,研制了能适应深海低温、高压等极端环境的电驱动人工肌肉,在高压低温环境下依然能保持良好电驱动性能。
这款电驱动人工肌肉也是团队研究工作的另一个重要突破。
在此基础上,科研人员利用围绕在人工肌肉外的海水作为离子导电负极,由机器鱼自带能源在人工肌肉内外侧厚度方向产生电势差,让高分子薄膜发生舒张与收缩形变。由此,实现“翅膀”的上下拍动,推动机器鱼在水中前行。
“我们的研究目标是以全新技术路线实现深潜器的小型化、柔性化、智能化,大幅降低深海探测的难度和成本。”李铁风在《浙江日报》采访是表示。
这种环境自适应的仿生软体机器人和智能系统,可为深海探索科考、环境监测与资源勘探提供解决方案,也为复杂环境与任务下,机器人及智能系统的设计提供新思路。
根据国际机器人协会的调查数据显示,全球工业界只解决了3%至4%的规则、刚性物品的自动化生产搬运问题,剩余96%左右的柔性异形、易损物品仍使用人工上下料。
关于软体智能机器人的研究,国内外科研机构也一直在进行。
2016年,TechnologyReview网站显示,哈佛的研究人员制作了一款章鱼状的机器人,全身软体且可以自动移动。这也是世界上首个全软体机器人。
这是个气动机器人。研究人员把过氧化氢液体泵入到机器人身体里的两个容储器中,与体内的铂线催化反应产生了气体。气体通过芯片控制,先引入到机器人一半的触手,再引入到另一半触手,交替反复释放,使得机器人看起来像在跳舞,不断地摆动触手,开始移动。
2019年6月2日,哈佛大学约翰·A·保尔森工程与应用科学学院(SEA)的研究人员开发出了最新型的软体机器人,它可以应用于太空探索、搜索和救援系统、仿生学、医学手术与康复等领域。
据外媒New Atlas去年报道,卡罗莱纳州立大学和天普大学的工程研究人员开发了受水母启发的软机器人。当水母机器人“放松”时,圆顶像一个浅碗一样弯曲。当空气被泵入通道层时,圆顶迅速弯曲,将水推出并向前推动。
在实验测试中,水母机器人的平均速度为每秒53.3毫米。该机器人适用了一种名为预应力聚合物的技术,使得软机器人更强大。此项研究发表在《先进材料技术》杂志上。
评论