

文|锦缎研究院 愚老头
自动驾驶,已经确定将是我们未来交通的主要承载方式。我们也知道,在通往自动驾驶的道路上,电动是唯一的选择,但是电动车具体如何完美实现自动驾驶,争议很大。
我们的判断是,未来的自动驾驶,一定有轮毂电机一席之地。
轮毂电机,就是将一个电机整合到汽车轮毂内,使汽车轮毂具有动力、传动和制动功能,成为一个独立的动力单元。

轮毂电机是实现电动汽车分布式驱动的核心技术,分布式驱动的意义,号称“中国轮毂电机第一人”吕超的这么总结,“这如同乔布斯认为点击屏幕一定要用手指,而不是用触屏笔一样,是最直接、最高效的驱动方式。”
电动车的驱动方式有两种,集中式和分布式。其中分布式驱动又分为轮边电机驱动和轮毂电机驱动。集中式,就是现在绝大部分电动车的驱动方式,电机放置在底盘上,通过传动轴驱动车轮运转,通常一个电机驱动两个车轮或者作为整车四个车轮的动力来源。轮边驱动属于分布式驱动,一个电机驱动一个车轮,但是电机并没有集成到车轮内,而是通过传动电机输出轴连接到车轮上。

轮毂电机驱动则是将电机集成到车轮内,彻底实现车轮自驱动,是分布式驱动的最终形式。
关于分布式驱动,还有内转子和外转子的方案,电机具体还有永磁同步、交流异步电机等等不同的选择,相关的技术路径我们今天不再赘述。我们要确定的问题在于,为什么说,通过轮毂电机实现的分布式驱动,是自动驾驶的终极解决方案呢?
因为自动驾驶需要汽车能够实现足够多的运动方式,只有分布式驱动能够完成这一点。
分布式驱动实现了四个车轮每个车轮的单独控制,每个车轮都可以做出360度的运动,可以完成你能想象到的,一个四方体的盒子在平面上所能实现的所有动作轨迹。
只有实现分布式驱动,才能够将机械的复杂度等量代换为代码的复杂度,用降维思路解决自动驾驶问题,将人从驾驶这种重复性劳动中彻底解放出来。
用机械实现一个单独的功能并不难,但在一个机械平台上实现多个功能,其复杂度就会有指数性的上升。我们数学上典型的解题思路是“升维思考,降维解题”,就是用更高的维度去理解问题,看透事物的本质,把事物分解成最基本的组成,然后用降维的方法来解决问题,化复杂为简单。这个升维的思路,也就是马斯克常说的“第一性原理”。
用纯机械来实现组合机械功能难度异乎寻常的大,那不妨换一条路径。用代码生成控制软件,通过操作电机驱动机械来实现各种机械功能。这样就将复杂的机械功能转换变成几行代码的写作,难度下降了N个数量级。
代码与机械功能之间的连接,就是电机。因为电机可以用非常小的误差实现机械功能,以我们常用的17位伺服电机为例,用脉冲来控制电机运动,每131072个脉冲转一圈,也就是最小精度是360/131072=0.0027度,定位误差可以达到0.001毫米。
这是一个代码改变世界的时代。代码驱动电机,电机带动机械,这个冰冷的世界就这么变得眉清目秀了起来。

学机械和做电子设备的人往往看不起写代码的,甚至连金融市场的有些人都觉得计算机软件是非实体经济,但事实是,千万不要小看这些写代码的。在机械以及电子产品的单项性能很难有大突破的当下,产品综合性能的突破必须靠代码。
工业机器人行业,就是一个典型的代码改变世界的例子。
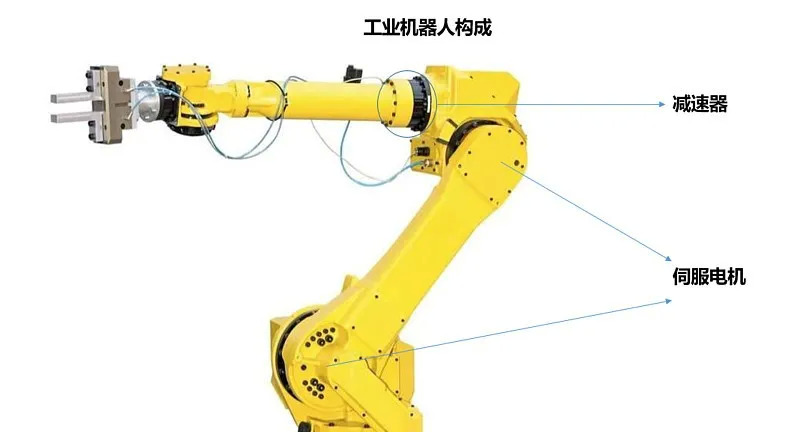
典型的工业机器人由控制设备、伺服电机和减速器三部分构成,控制设备带动了伺服电机,减速器作为电机外延的机械设备,能够实现控制设备下达的各种指令,控制设备的核心就是那一行行的代码。工业机器人是下一代工业革命的核心设备,原因就是代码的无穷延展性,所带来的工业制造的无限可能性。
另一个例子是工业皇冠上的明珠——隐形战斗机。

作为世界上仅有的三款隐形战斗机之一,中国的歼20为达到美国F22同等的战斗力水平,采取了鸭翼设计,就是我们上图歼20前面两只小翅膀。
信奉大力出奇迹,板砖飞上天的美国空军,对鸭翼的态度是“鸭翼最好的位置就是装在敌人的飞机上”,原因就是鸭翼虽然可以大幅提升飞机的气动性能,减轻对发动机的依赖,但问题也同样显而易见,对飞行控制系统的要求极高,稍有问题就机毁人亡。成飞完美的解决了这个问题,歼20自试飞之后就没有出过大的飞控问题。
上图我们可以发现,歼20落地的时候有10个舵面,这表明歼20的飞行控制系统在飞机飞行的全状态至少要控制10个舵面,歼20的飞控软件,可能是这个星球上最复杂,难度最高的运动控制代码组合。实际上,对于后发国家来说,外形可以抄,甚至发动机也可以买到,但飞控真的没有办法,需要天量的风洞测试和无数码农青春的献祭,是真正的超级大国标配。
自动驾驶,同样要遵循这样的路径。
实现自动驾驶,可能的路径很多,但无一例外,都要求底层的机械系统具有强大的延展性和精确的操控能力。代码组合构成控制系统,保证了驾驶操控的延展性,电机操控下的分布式驱动,则实现了驾驶系统的精确发力和定位,两者构成了自动驾驶的核心驱动力。
代码+分布式驱动,当下最可见的应用不是终极的自动驾驶,而是迅速实现车身的稳定控制。具备这个功能的系统就是我们常说的ESP(Electronic Stability Program),最早由博世研发并投入量产,随后其他的汽车厂商纷纷跟上,比如通用的ESC、丰田的VSC,名称虽然不同,但基本功能类似。国内判断一个车型是否高端,很长一段时间就是以是否安装了ESP为重要标志。
由于ESP技术掌握在博世这样的一级供应商手里,价格不菲,对于一般的汽车厂商来说,如果新车型上市,增加了ESP以后总价格不变,就意味着必须大幅压缩其他的成本,这对汽车厂商来说压力山大。不仅仅对燃油车是这样,对于集中式驱动的电动车,也会面临同样的问题。提升功能就必须增加配置,也就意味着成本的层层递进,超过消费者的承受能力之后就会带来需求的下滑。
如果实现了分布式驱动,上述问题就迎刃而解。不管是ABS,还是选配的时候价值上万元的ESP,或者其他的什么车身控制系统,所需要的,只是更新一次代码,就这么简单。大家再也不用一个车型几年等一回的,翘首以盼等着厂商加配置了。如果有一天过渡到了自动驾驶,需要的也不过是一次稍微耗时长一些的,操作系统版本的更新,边际成本可以降到无限低。
汽车分布式驱动也有两种方式,一种是轮边电机驱动,另一种是轮毂电机驱动。
轮边电机因为电机与车轮是分开的,体积比较大,注定是一个过渡性的方案,目前主要应用于一些对体积要求不太高的商用车,比如客车中。轮毂电机将电机集成到了轮毂中,实现了动力、传动和制动功能的集合,非常适合乘用车这种对体积效率要求高的车型,是自动驾驶最终的解决方案。
那么现在的问题是,轮毂电机都出现了一百多年了,为什么还一直停留在纸面上呢?
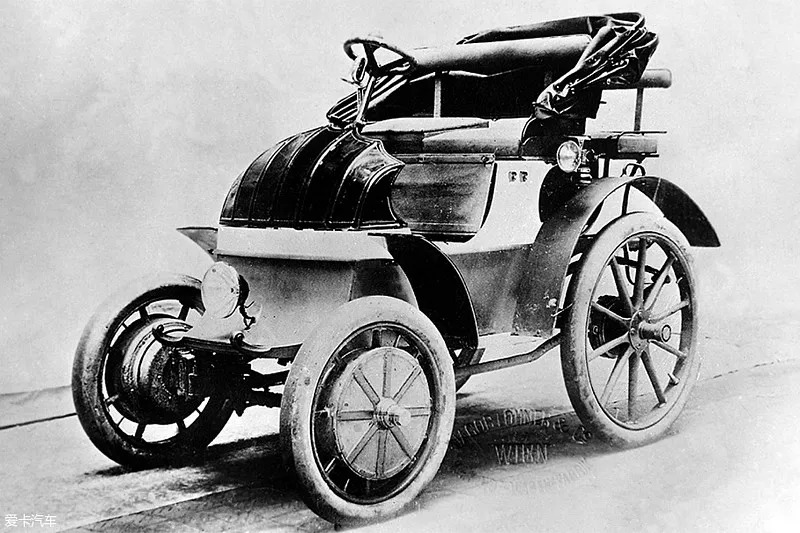
1896年,费迪南德·保时捷,也就是后来的保时捷创始人,就在英国注册了轮毂电机的专利,1900年就制造出了第一辆前轮轮毂电机驱动的电动车。因为电池技术不成熟,内燃机取代了电动车,在未来的一百多年里,成为乘用车的主流,依靠电力驱动的轮毂电机,也就一直被雪藏。直到最近的十年,以特斯拉为代表的电动车重新登上历史舞台,轮毂电机才又一次成为热点。
2016年,中国掀起了一波投资轮毂电机的热潮,我们去搜索关于轮毂电机的券商报告,2015年3篇,2016年19篇,2017年2篇,2018年3篇,2019、2020这两年一篇都没有,哪怕在电动汽车热到发烫的今天,轮毂电机却依旧冷冷清清,任凭相关厂商吼破了嗓子也应者寥寥,仿佛被大家遗忘了。
轮毂电机产业化确实有自己的缺陷,簧下质量增加和电机材料过热退磁,是两个必须要迈过的门槛。汽车悬挂一般由弹簧制成,为了提高反应速度,方便操控,一般要求悬挂下面的结构尽量轻便,而轮毂电机将电机集成于轮毂中,会显著增加簧下质量,这会对操控和安全性产生很大的负面影响。
此外,电机集成在轮毂这么一个狭小的空间内,制动的时候会产生很大的热量,这些热量传导到电机上,而电机材料超过200度以上就会退磁,必须通过额外的散热系统保证电机不过热。
全球最领先的轮毂电机生产厂商是三家欧美企业,即荷兰的 e-Traction、美国的Protean、欧洲的Elaphe,这三家公司都基本都在中国有深入的合作,其中2016年湖北泰特机电全资收购了e-Traction,2019年又被恒大收购,恒大还拿下了美国的Protean,三家公司有两家被恒大收入囊中,至于Elaphe,A股的亚太股份控制了20%的股权,并与其在国内建立了控股的合资公司。
前两家公司在并入恒大之后,在量产车型方面进展不大,至于亚太股份,公司在接受调研的时候多次表示,“公司轮毂电机的生产线和检测设备已安装完成,基本满足量产条件”,“公司正在按计划推广轮毂电机项目,前期已与多家整车厂在开发合作,目前已具备量产条件,公司会努力加快推进轮毂电机的产业化。”,到现在为止,还是但闻楼梯响,不见佳人来。
轮毂电机的窘境,固然可以说产品确有缺陷,但更多的是原因是,这个市场没有第一个吃螃蟹的。没有应用,就谈不上改进,更遑论推广。轮毂电机在电动自行车和电动摩托上已经应用好多年了,对于电动汽车而言,簧下质量和电机材料过热,也不是解决不了的难题,难就难在,在电动车刚刚开始进入大规模普及阶段的时候就谈轮毂电机,步子有些大。
《华为公司的核心价值观》这本书里面写道:“从统计分析可以得出,几乎100%的公司并不是技术不先进而死掉的,而是技术先进到别人还没有对它完全认识与认可,以至没有人来买,产品卖不出去却消耗了大量的人力、物力、财力,丧失了竞争力。”,“华为要保持技术领先,但只能是领先竞争对手半步,领先三步就会成为先烈”。

距离轮毂电机概念最火的2016年,4年过去了,市场预想的轮毂电机大爆发没有来到,依然还是在期待量产的漫长等待中。
但正如我们在一开始分析的那样,在实现自动驾驶的赛道上,轮毂电机是注定要趟出的一条路,并不会以个人甚至主机厂的意见为转移,只是一个时间早晚的问题。但是第一个吃螃蟹的主机厂,或者车型,成为先烈的概率很大,先人的墓碑给后人留下了指引,一条朝圣之路就此诞生。
股市是一个理想与现实交织的地方,经济学家希望的那种均衡状态,几乎没有存在过。我们要做的,不是在彻底现实的地方寻找利空,也不是在理想主义膨胀的时候发现利多,而是相反,要在彻底现实的地方寻找梦想的可能性,在理想主义膨胀的时候寻求现实主义的支撑。
本文系基于公开资料撰写,仅作为信息交流之用,不构成任何投资建议。作者在雪球设有同名专栏。
评论