
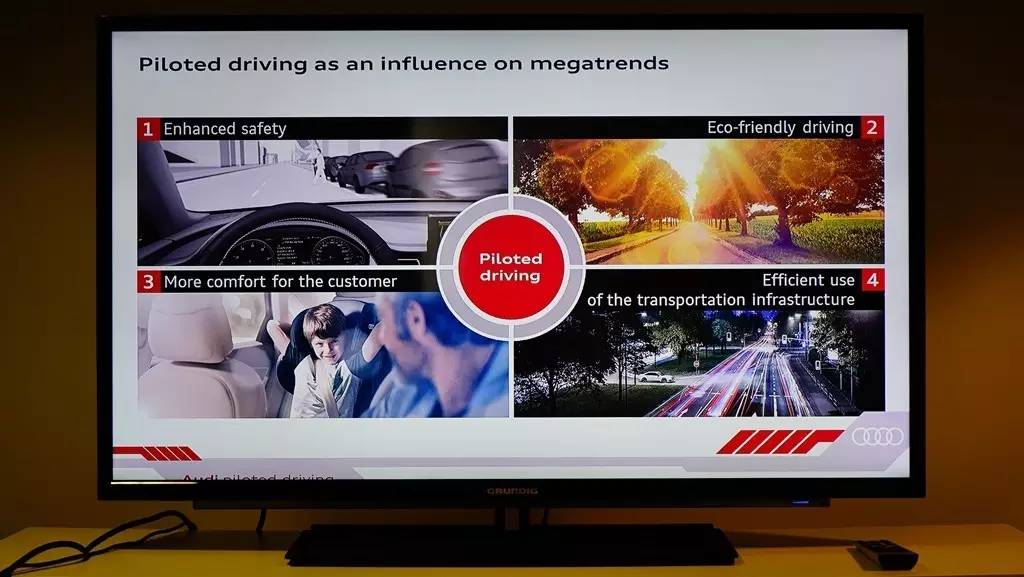
华尔街日前参加了一项由奥迪组织的自动驾驶体验活动。老实讲,这种由厂家组织的体验,感觉好是正常的,如果感觉不好那只能说明活动失败了。也就是说,按照主办方组织的路线、规划,我们确实可以感受到一些未来驾驶的感觉。那种看着方向盘自己转,油门刹车自己踩的过程,如果是第一次体验的话,说震撼都不过分。
然而,所有这些都限于“有组织的活动”。时至今日,没有任何一个厂商,当然也包括奥迪在内,敢于将此类活动彻底放开,更不用说将一款类似的车交给我们开回家了。于是在体验过程中华尔街就在想:面对这种可能要未来十年甚至更长时间才有可能普及的技术,现阶段的发展到底应该朝那个方向使劲儿?再具体一点,现阶段的自动驾驶到底应该由谁说了算——是完全靠研发人员的“主观设定”,还是由车主与系统共同完成?

完全、彻底的无人驾驶还非常遥远
我们可以把所有的脑洞打开,去想象未来十年或者二十年的自动驾驶。在那时,或许“驾驶”一词都已成为历史。这个时候的“车”,可能与我们现在印象中的“车”会截然不同,例如可能已无所谓车头与车尾,甚至连风挡玻璃之类的也不复存在。这样的“车”,驾驶风格上确实可以做到千篇一律。当然,所谓“驾驶乐趣”也将彻底不复存在。人们坐进车内,只不过是选择了一个相对独立空间且可以指定目的地的交通工具而已。车辆的行驶将会和地铁、高铁这种公共交通一样,行驶过程中的一切操作都与驾乘者无关。这个蓝图虽然美好,但实现起来的难度大家应该都清楚。至少有一点可以肯定,在车辆之间完全联网、信息远程互通之前,这种场景是不可能实现的。

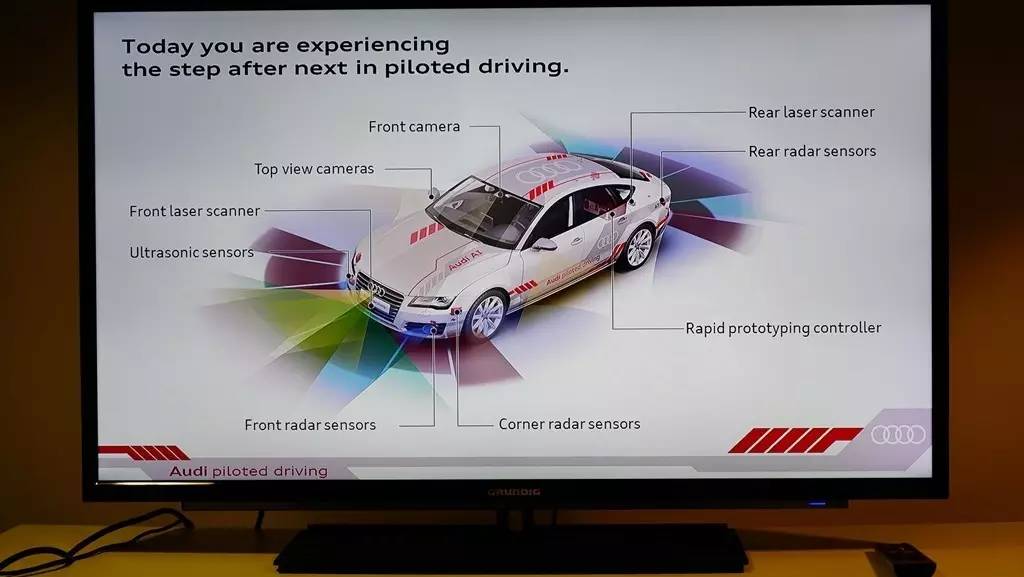
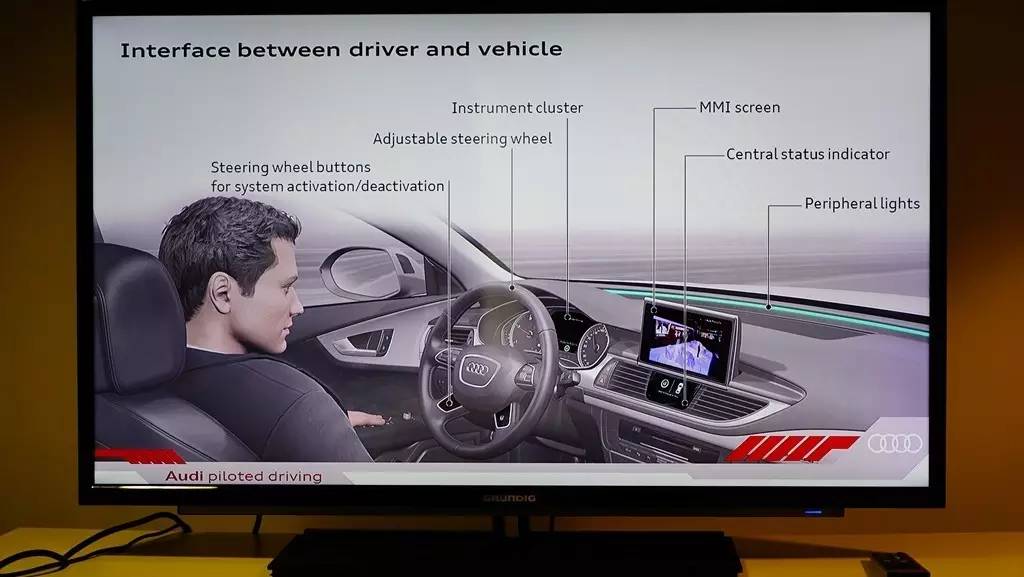
那么在现在和这种未来场景之间是什么情况呢?大家能想象的,也就和华尔街在奥迪自动驾驶活动中的体验类似——车还是印象中的车(如已成为自动驾驶明星的奥迪A7),还是有方向盘,驾驶者还必须老老实实的坐在驾驶座上,眼睛也得时刻关注路况,以备自动驾驶无法控制的场景时及时介入。不要太乐观,这种场景在相当长的一段时间内是无法打破的。

自动驾驶也存在个性化?答案是肯定的
然后我们再来看常规的驾驶,不同的驾驶者风格差异是非常大的。有比较急性子或者激进的,开车喜欢加速快一点,跟车跟得会紧一点,并线超车会积极一点,过弯的时候会喜欢有一点侧倾的感觉并且可能会在出弯前加油等等,他们会认为车子这样跑才比较爽。相反,一些稳重派则需要保持更长一点的跟车距离才觉得踏实;超车的时候如果没有200%以上的把握则都会选择放弃;进入弯道时,则是能慢则慢,稍微有一点点侧倾就会觉得不舒服。遇到出入口或者要拐弯,可能提前一两公里就并好线,并且不管前车有多慢也会老老实实跟着。

很显然,这两类人群的驾驶风格是截然不同的。如果自动驾驶的设定是按照后面的风格设定,稳重和安全是OK了,但如果驾驶者是前面那种风格的人,则十有八九会选择关闭自动驾驶,因为他们会感觉“太捉急”。相反,如果自动驾驶的设定是按照前面那种风格,那么后面那种风格的人坐进去会从头到尾感觉“心慌慌”,最后的结果也是会不停的“手动介入”或者放弃自动驾驶模式。这样一来,所谓的“自动驾驶”还有什么意义可言?
有人说,这简单,在驾驶风格上设置两个或者三个模式可选不就完了?就像现在的车有运动、标准、经济模式一样。自动驾驶可不像动力风格那么简单。前面所说的两个例子,也只是比较极端的例子而已。不同的驾驶者,对于不同路况的反应都是不一样的,会形成无数种组合方式。举这么个例子或许你就能理解了。例如可能存在这样的驾驶者,在跟车的时候比较激进,绝对受不了频繁被人加塞,但在弯道上却极其保守;亦或者反过来,看见弯道就像打了肾上腺素,但在日常跟车时却宽容大度,绝不与人争抢,喜欢远远跟着。这,你让工程师如何预先设定?
如何实现自动驾驶个性化:驾驶者与电脑共同完成
怎么办?看到“驾驶者与电脑共同完成”这样的话语,有人可能会说:这不就是现在时髦的ADAS吗?车子主要还是由驾驶者来开,只不过加入了很多主动安全驾驶辅助系统而已,例如自动跟车、主动刹车、车道保持、自适应巡航等等。如果只是这些,华尔街还有必要在前面费那么多话吗?华尔街在这里想说的,其实是在自动驾驶系统中加入一个模仿、学习的功能。


更直观的说,相当于驾驶者先自行驾驶,示范给自动驾驶系统看。而自动驾驶系统,则在驾驶模式选择上进行碎片化编程,并依据驾驶者的风格来进行大数据组合,最后形成一套适合驾驶者的自动驾驶风格。然后在接下来的自动驾驶模式过程中,驾驶者就会感觉到如同自己在驾驶一般,每一个环节都符合自己的习惯,从而爱上自动驾驶、提升自动驾驶模式的使用频率。与此同时,由于驾驶风格与驾驶者的习惯一致,在需要驾驶者介入时,驾驶者的介入点也会恰到好处。
这种学习型的自动驾驶还有一个好处,即可以更好、或者说更早地让人体会到自动驾驶。事实上大众已经在开始演示这种技术了。例如固定车位,由驾驶者演示好固定停车线路,然后在之后的每次停车由系统依照这样的线路来自动完成。再延伸一点,我们如果把日常上下班的固定线路演示给自动驾驶系统,让它熟悉这条路的各种情况以及车主的应对方式,并进行碎片化的编程组合,从而在这条路线上达到一种高智能、且与车主风格契合的自动驾驶状态,这无疑也可以大幅度提升自动驾驶的使用频率。而这,显然也要比全路况的自动驾驶实现起来要更加容易。
结论:
在自动驾驶进入商业化量产的过程中,必然会经历驾驶者与自动驾驶模式之间的“适应性”问题。这些问题在目前这种纯粹保守的实验阶段还无法凸显出来,因为大家都感觉很新鲜,而且都是“有组织”的体验。而一旦商业化,这种“适应性”会直接影响到自动驾驶模式的使用频率,以及大家对自动驾驶的认同度。这一阶段,只有符合驾驶者风格的模式,才能真正体现出竞争力。
事实上奥迪在研发自动驾驶的时候就想到过这一点。例如奥迪曾表示,应该让自动驾驶行为更像人类。因为电脑的衡量标准是非感性的,它认为妥当的方案并不见得所有人都感觉妥当。例如旁边是一辆大卡车或一辆小轿车,自动驾驶会认为并无本质区别而保持同样的距离,但多数人此时面对大卡车会下意识离远一点(注意,这里说的不是“远离大货”的那种原因,而是人下意识对庞大车辆的畏惧感)。因此在自动驾驶程序编制时,应考虑到这一点。然而很显然,只做到这些仍然是不够的。
最后可能有人担心:主动学习这种想法有道理,看上去也很美,但技术上是否能够实现呢?在这里华尔街只想说一句:在N年前,自动变速器就有学习功能了,这对于高度智能化的自动驾驶难道还是问题吗?自动驾驶目前在资本市场上“如火如荼”,中国的第一个国家级无人驾驶测试基地也已经有了,各种标准也在制定中。可以想象,未来的三到五年,将是此类技术突飞猛进的时期。那么在这个过程中,“劲儿”一定要使对了方向才好,不是吗?
评论