
近年来,计算机视觉AI技术发展迅速,尤其是人工智能的引入大大提升了算法的能力和实用性。腾讯科学家们认为,自动驾驶是在未来十年必定会到来的技术。其原因何在?自动驾驶具有哪些关键技术?这些技术之间如何协同工作?对物流领域将带来哪些影响?

14日,在《中国企业家杂志》推出的一篇名为《腾讯杰出科学家写给2029的信:计算机视觉AI技术的爆点在哪里?》的文章中指出,在数不清的视觉AI应用中,我们认为未来技术的爆发点可能来自三个方面:信息的整合和提取、医疗和自动驾驶。
我们注意到,在文章中腾讯科学家们强调,自动驾驶是在未来十年必定会到来的技术。
下面,我们重点跟大家讨论的是自动驾驶,为什么说自动驾驶是未来十年必会到来的技术?它具有哪些关键技术?这些技术之间如何协同工作?对物流领域将带来哪些影响?
自动驾驶及其技术发展路线
为什么说自动驾驶是未来十年必会到来的技术?
在谈及这个问题之前,我们先来看看自动驾驶是什么?它的技术发展路线又是怎样的?
首先,自动驾驶,常被人称作无人驾驶,通常采用激光雷达、摄像头、毫米波雷达作为感知工具,采用机器学习、深度学习算法处理感知工具收集来的动态路况信息生成安全驾驶相关的指令。
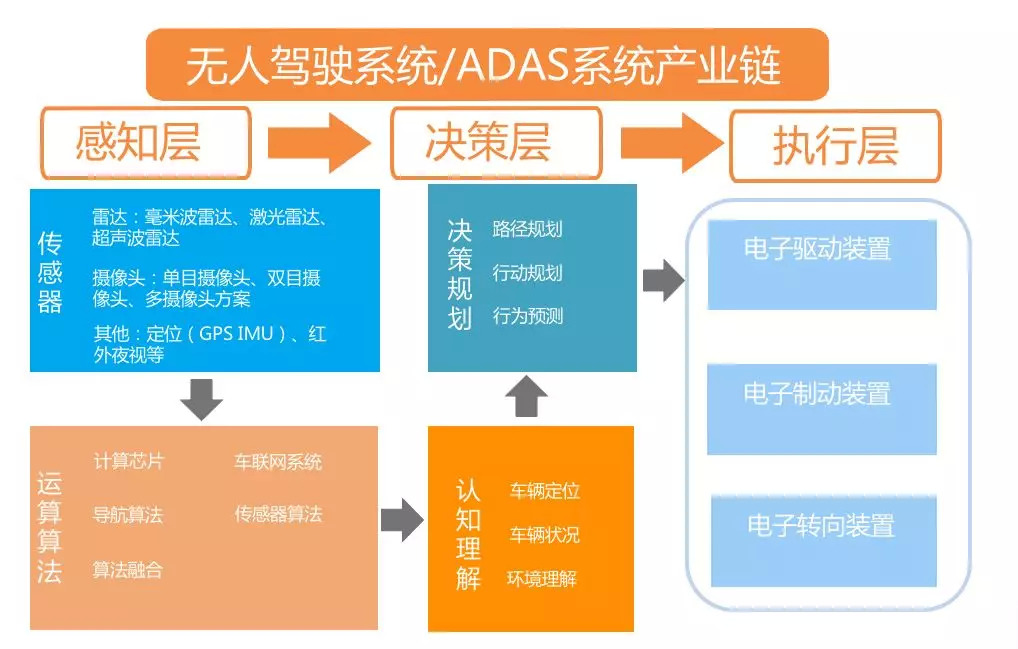
从硬件上来看,自动驾驶需要具备各类传感器、控制器、CAN卡、全球定位系统(GPS)以及惯性测量单元(IMU);软件上,自动驾驶包含了感知、融合、决策、执行等核心部分。
国际汽车工程师协会(SAE)曾根据智能化、自动化程度将自动驾驶分为6个层级:无自动化(L0)、驾驶支援(L1)、部分自动化(L2)、有条件自动化(L3)、高度自动化(L4)和完全自动化(L5)。具体如下表:
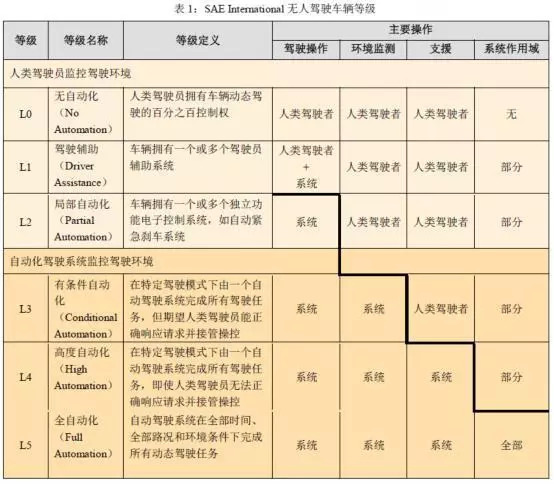
其中,只有达到第三级及以上等级才可以理解为是无人自动驾驶。而本文主要探讨的正是无人自动驾驶。
目前,随着无人驾驶车辆技术的迅速发展,大部分厂商生产的无人驾驶车辆均能达到第3级,少部分企业可以生产第4级别的无人驾驶车辆。目前,国内百度、阿里、腾讯、华为等企业都在自动驾驶层面进行了战略布局。
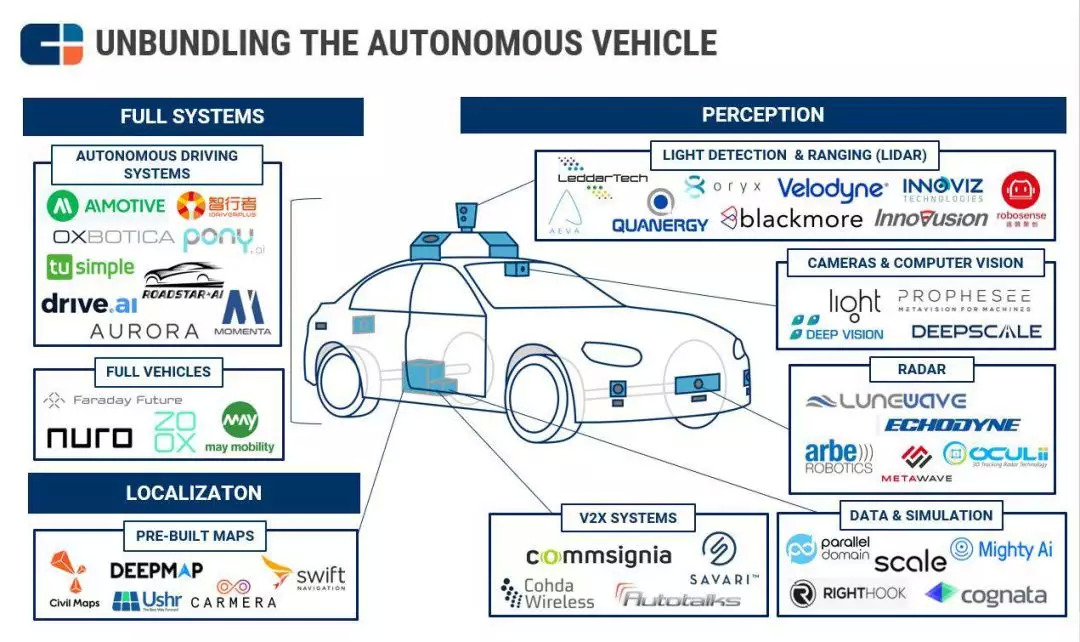
国际上,CB Insights曾拆解分析了实现无人驾驶的诸多技术及公司。
其次,自动驾驶技术发展路线。
回顾自动驾驶技术发展路线,企业间的布局也大不不相同。机器学习研究会认为,自动驾驶有两条不同的发展路线:第一种是“渐进演化”的路线,也就是在今天的汽车上逐渐新增一些自动驾驶功能,例如特斯拉、宝马、奥迪、福特等车企均采用此种方式,这种方式主要利用传感器,通过车车通信(V2V)、车云通信实现路况的分析。
第二种是完全“革命性”的路线,即从一开始就是彻彻底底的自动驾驶汽车,例如谷歌和福特公司正在一些结构化的环境里测试的自动驾驶汽车,这种路线主要依靠车载激光雷达、电脑和控制系统实现自动驾驶。
自动驾驶具有哪些关键技术?
正如上面所说,自动驾驶包含了定位、感知、融合、决策、执行等核心层面,涉及不同的技术。那么无人驾驶具体都有哪些先进技术,这些技术之间究竟如何协同工作?未来趋势如何?
1.感知技术
无人驾驶汽车需要快速识别交通信号和标志,以及其他汽车、自行车和行人,并感知其距离和速度,作出对应反应。
也正因此,无人驾驶汽车通常需要依赖摄像头及其他传感器,通过这些传感器收集数据,在以名“传感器融合”的技术混合在一起,提供汽车车身周围的无物理环境信息。
当然,要实现上面这些就需要不同的感知设备和技术,即传感器如摄像头、激光雷达、毫米波雷达和超声波雷达等。

(1)摄像头
摄像头主要用来于获取图像信息,识别颜色和字体,帮助检测道路标志、交通信号灯和街道标记,在自动驾驶解决方案中具有不可替代性。
(2)雷达、激光雷达、毫米波雷达
汽车通过雷达发出无线电波,检测前方物体的距离、范围和速度,相比于激光雷达,雷达技术具有检测范围更广、不依赖于更容易出错的旋转部件、且成本更低的优势。目前,雷达技术被广泛用于无人驾驶汽车和ADAS。
激光雷达被认为是无人驾驶汽车中最强大的传感器之一,具有高精度、高分辨率的优势,通过激光扫描能精准创造出汽车周边环境的3D模型,以便探测周围的行人、车辆等。
毫米波雷达全天候工作能力较强,可与其它传感器形成互补。如在烟雾环境中毫米波雷达工作能力比较强,弥补了摄像头的劣势,而在探测行人上,摄像头的工作能力更强。
这也就是我们所说的融合,通过两种或多种传感器间融合的方式取长补短,从而适应各种环境条件。
(3) V2X(Vehicle to Everything传感器)
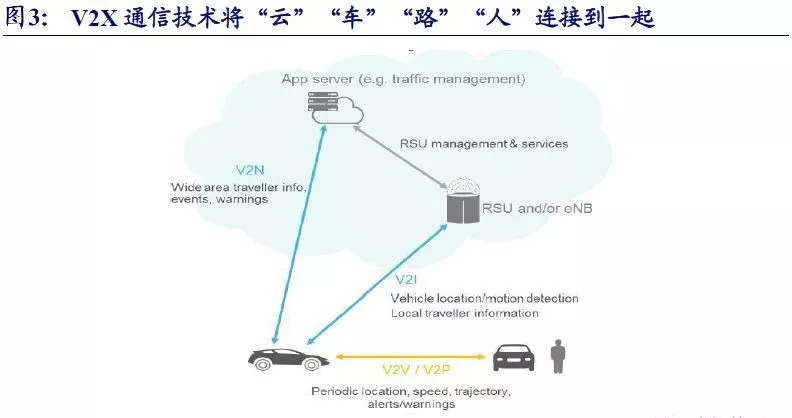
V2X,是指通过搭载传感器、控制器和执行器等设备并融合现代通信与网络技术,从而实现汽车与网络(V2N)、汽车与汽车(V2V)、汽车与基础设施(V2I)以及汽车与行人(V2P)之间的通信。不过,该技术仍处于早期阶段。
如果说摄像头、雷达等传感器被认为是智能技术路线的话,V2X则是网联路线。它基于不同主体之间的信息交互来实现环境感知、智能决策和协同控制,被认为是未来自动驾驶的关键技术。
2. 计算机视觉及大数据
不管是摄像头、雷达,还是 V2X,它们所获取的环境信息和数据,都需要计算机视觉技术、云端大数据进行分析决策,并最终由控制系统执行。
3. 模拟测试

模拟测试对自动驾驶至关重要,因为它训练指导车辆的算法,也是考量其安全可靠的重要因素之一。
自动驾驶需要足够的场景进行模拟测试,包含了模拟决策及模仿学习,比如对传感器例如摄像机、激光雷达、GPS等进行仿真模拟。
硅谷一家提供自动驾驶模拟服务的公司Metamoto的创始人兼CEO Chad Partridge认为,“自动驾驶所需要的是大规模可扩展的,能同时进行上百万测试的模拟服务,就像Google所做的那样,但Google不会向外部提供其技术。”他认为,自动驾驶系统所需的模拟面向的是机器与软件,这跟传统的模拟面向驾驶员有所不同。
4. 定位
自动驾驶对于定位的精度要求极高,这也是它执行所有驾驶策略和规划路径的依据。
(1)高精度地图(HD MAP)
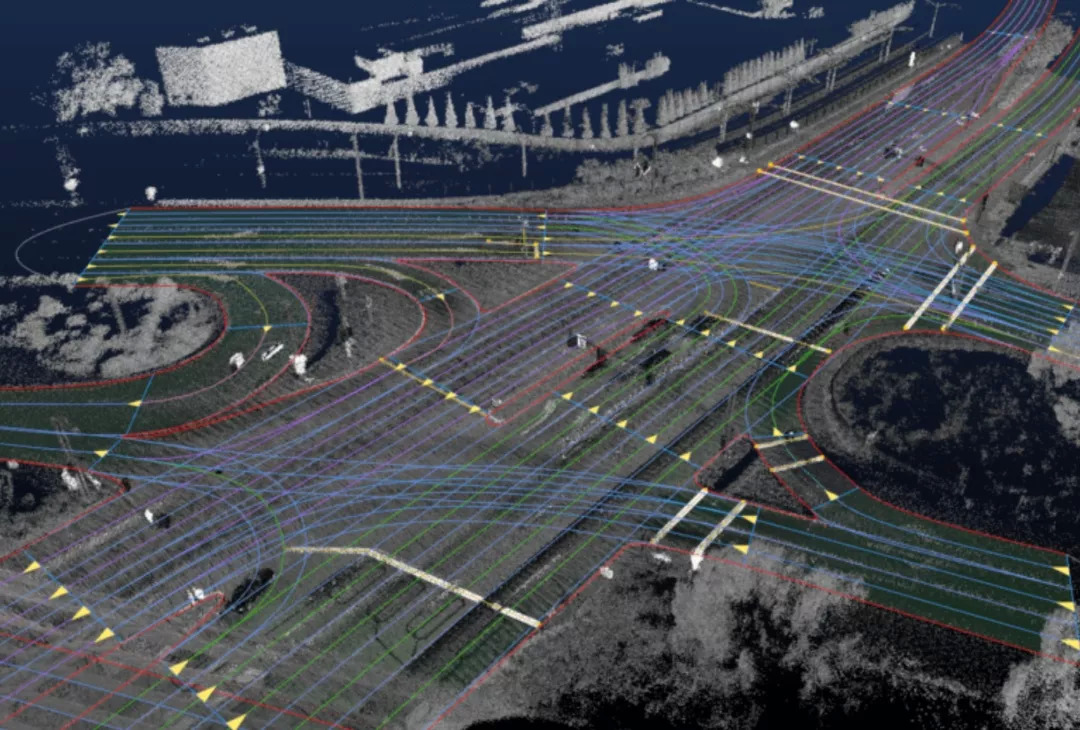
资料来源: Ars Technica
高精度地图主要为车辆环境感知提供辅助,可以提取出车辆周边的道路、基础设施、交通等对象以及各对象之间的关系,从而提高车辆对周围环境的鉴别能力,并帮助车辆进行规划决策。
目前,HERE Maps和TomTom是构建HD地图这一领域的两大领军公司。HERE Maps在2015年12月被德国汽车制造商联盟(奥迪、宝马和戴姆勒)收购。TomTom在今年1月与百度合作。此外,科技巨头谷歌在地图领域也取得显著进展,谷歌的无人驾驶部门Waymo通过自家车辆在道路上收集来的数据,自行构建高清地图。
(2)定位导航系统
自动驾驶使用的定位系统是以高精地图为依托,通过导航系统来定位车辆的位置。目前定位的实现方式主要有全球导航卫星系统(GNSS)、惯性导航系统(INS)、里程计和SLAM自主导航系统。
当前,较为流行的解决方案全球导航卫星系统+惯性导航系统。其中,全球导航卫星系统利用卫星进行定位和导航,优点是精度高,但其信号易受环境干扰,主要包括美国GPS、中国北斗、欧洲伽利略和俄罗斯的Glonass;惯性导航系统利用安装在物体上的陀螺仪和加速度计来测定物体位置,优点是自主性高,但导航误差会随时间推移而积累。其中算法、芯片及封装是竞争关键。
自动驾驶汽车对定位精度要求较高,一个微小的位置误差就有可能导致严重交通事故。因此,通过多种导航方式融合实现优势互补,有望成为自动驾驶汽车导航系统的发展趋势。
为什么说自动驾驶是未来十年必会到来的技术?
在了解了自动驾驶技术和发展路线之后,我们不难发现其重要性和为什么说是未来十年必会到来的技术。
腾讯科学家们认为,自动驾驶中核心需要解决的问题在于环境识别。目前自动驾驶还处于测试阶段,是因为对环境信息的不完全理解,因而做成决策错误。而解决这个环境识别的问题,是会随着在路上行车测试数据的不断增加而趋于完美的。这样考虑下来,自动驾驶就是一个必定会到来的技术。
同时,他们特别提到了自动驾驶技术对物流行业的影响。
他们认为,无人驾驶汽车的普及,将会大量释放物流业的人力成本,让B to C的生意更容易和快捷,物价将会因为人力成本的减少变得更合理。
实际上,自动驾驶在物流行业具有多种落地场景,如高速货运、港口码头物流、同城物流或最后一公里等等都需要自动驾驶。
注:本文提到的《腾讯杰出科学家写给2029的信:计算机视觉AI技术的爆点在哪里?》,作者:腾讯杰出科学家、腾讯优图实验室负责人贾佳亚,腾讯优图实验室总监戴宇荣博士郑冶枫博士,中国企业家杂志记者崔鹏采访整理。
评论