
编译|智东西 王颖
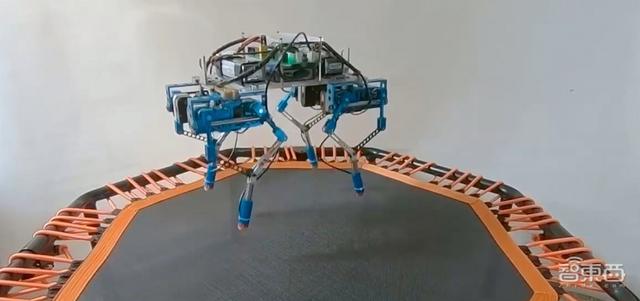
智东西6月26日消息,现在我们可以看到的很多机器人具有跳跃和奔跑的技能,但是这些机器人的设计结构十分复杂,想要实现跳跃还要为其设计专门的弹性腿,而且造价非常昂贵。为了能有更简单经济的方式实现机器人的跳跃研究,浙江大学博士Boxing Wang通过蹦床解决了这一问题,让四足机器人在蹦床上跳跃。
现在有很多四足机器人都是高度动态的,具有奔跑和跳跃的能力,但是这些机器人往往是相当昂贵和复杂的,需要强大的驱动器和有弹性的腿。
Boxing Wang希望能够通过简单实惠的硬件来解锁机器人的跳跃能力,他说:“我想研究四足跳跃控制,但我没有定制的强大驱动器,也不想设计有弹性的腿。所以我决定用蹦床做一个普通的伺服驱动的四足机器人来跳跃。”
一、机器人上蹦床,跳跃不用弹性腿
Boxing Wang和他的同事们一直想研究四足机器人的跑步和跳跃方式,所以他们使用了能接触到的最强大的伺服系统:Kondo KRS6003RHV驱动器制作了一个机器人,它的最大扭矩为6Nm。但经过一些简单的测试后,他们发现,致动器系统不够快也不够强大,不足以让机器人跳起来,他们还需要一个弹性元件储存能量来帮助机器人实现跳跃。
Boxing Wang表示,“通常情况下,人们会选择为机器人设计一个有弹性的腿,但在我的实验室里,没有人确切知道如何设计它们,如果我们试图制造有弹性的腿,但是我们没能让机器人跳起来,我们不能确定问题是腿还是控制算法。对于硬件,我们认为最好从一些可靠的东西开始,这些东西肯定不是问题的根源。”
在他们的四足机器人跳跃研究中,Boxing Wang和他的同事用到的只是一个蹦床和一个惯性导航系统(IMU),以及每只脚末端的小小触觉开关,用来检测触地和起跳动作。此外,让机器人在蹦床进行跳跃测试还有另一个好处,因为它的边缘比中心更硬,机器人会跳跃时倾向于把自己集中在蹦床中心上,所以在出现问题之前,研究人员可以通过机器人跳跃的变化得到一些预兆信息。
Boxing Wang表示,他们并不认为让四足机器人在蹦床上跳跃是一个突破,但这对原型测试很有用,尤其是对那些对四足跳跃控制感兴趣但手头没有合适机器人的人。
二、让机器人蹦床的想法从何而来?
Boxing Wang说,让机器人上蹦床的创意并不能算他们苦思冥想的结果,而是在一次朋友们在奶茶店聊天时的突发奇想。但他们马上意识到了这是一个完美的选择,因为它可靠、简单,并且已于购买,所以他们果断的决定要用蹦床来尝试一下。
那么使用蹦床,而不是真正的跳跃四足机器人来进行研究又有什么不同呢?对此,Boxing Wang介绍到,一般来说,没有任何一个表面是完全没有形变的,它们都有些许弹性。因此在蹦床上的跳跃和在坚硬表面的跳跃活动没有本质的区别。在蹦床上使用四足机器人能够更容易的了解如何利用弹性,也更有效率,如果使用有弹性腿的四足机器人来解决同样的问题则需要更多的硬件设计时间。
蹦床实验可以看做是未来真实四足机器人跳跃设计的一种早期测试。蹦床测试的重点首先在于开发控制算法,并检验通用硬件结构的稳定性。由于在刚性腿的蹦床上跳跃和在有弹性腿的硬地上跳跃的相似性,因此它们的控制算法是可以互相迁移的。
三、机器人为何要学会跳跃技能?
需要跳跃机器人的场景有很多。例如,一个真正的跳跃四足机器人可以用来帮助设计能够奔跑的四足机器人。因为在跳跃和奔跑的活动中,都有一个时刻是机器人四足全部离地的。因此,从跳跃开始,然后将技能迁移到跑步对机器人来说更容易。具体来说,如果不严格控制跳跃的角度,单脚跳或垂直跳很容易转化成跳跃跑。其实,跳跃的四足机器人和奔跑的兔子很相似,所以现在它也被称为奔跑的四足机器人。
据我们所知,跳跃式四足机器人的实际应用可以用于行星探索,就像SpaceBok的设计目的一样。在低重力环境下,跳跃比走路更有效率,而且更容易越过障碍物。
四、新创意助力各类机器人研究
对于有弹性腿的跳跃四足机器人,控制算法可以首先通过使用简单的刚性腿进行蹦床试验来设计,在所设计的控制算法的帮助下,可以是弹性腿硬件的设计更加高效。
Boxing Wang说:“与其他动态机器人不同,我们的机器人中的每一个可活动关节都通过位置控制伺服器进行控制,而不是自定义的扭矩控制电机。大多数人都不认为位置控制机器人可以执行高动态运动,比如如跳跃,因为位置控制电机通常意味着高的齿轮比和缓慢的响应。然而,我们的工作表明,在弹性的帮助下,稳定的跳跃能通过位置控制伺服器实现。所以对于那些已经拥有位置控制机器人的研究者而言,它们可以通过蹦床探索机器人的潜力。”
原文来自:IEEE Spectrum
评论