

文 |
汽车,作为一款我们在日常生活中能用到的复杂度最高、产业链最长的工业品,正在以它诞生百年来从未有过的速度进化着,电动车与传统能源车之争持续到现在,如果非要说孰优孰劣,我认为可以这样来概括:传统能源车拥有现在,而电动车拥有未来。
汽车"新四化",即自动驾驶Automated、互联Connected、电动Electric、共享/服务Shared,不管写成ACES还是CASE,这四个大趋势已是业界共识,而电动就是其中重要的一项。
不止于此,在ACES的另外两项,自动驾驶A和互联C上,电动车相比于传统能源车,也有着很多不可比拟的优势,且听我慢慢道来。
自动驾驶控制上,电动车更具优势

2018年10月18日,科技部部长万钢在世界智能网联汽车大会现场做主旨演讲时说:”电动汽车是自动驾驶的最佳载体。”

自动驾驶系统,从架构来说,可以分为:感知层Perception、规划层Planning、决策层Decision、控制层Control。
不同厂商、研究者采用的叫法和分法可能略有不同,比如下面系统的模型框图里,总体分了三层,它是把Planning和Decision合在一起都叫Planning。
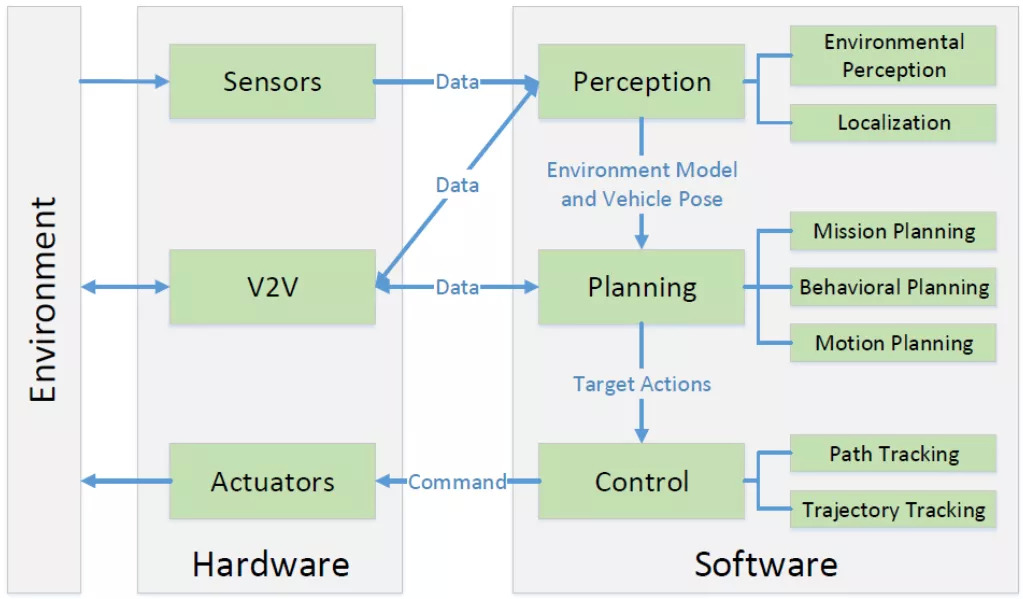
感知Perception
顾名思义,是自动驾驶的"感官",也就是通过LIDAR/Radar、 摄像头和传感器来感知车辆周边的环境,包括其他车辆、行人、障碍物、道路和标志等等。
以目前中国品牌电动车最高代表的蔚来ES8为例,NIO Pilot系统的传感器部分采用了:
三目前向摄像头,用于车道保持、车道偏离预警、标志识别、前向碰撞预警、制动等功能;
4个环视摄像头,用于生成环视图像;
5个毫米波雷达,用于盲点监控、车道变换、前后来车、开门预警;
12个超声波传感器,用于泊车和窄路辅助;
1个驾驶状态检测摄像头,用于判断驾驶员的视线和注意力。-
规划Planning和决策Decision
是指基于感知的信息以及车辆的目标(比如从A地到B地),形成有目的的决策的过程。这部分可以认为是自动驾驶的大脑,是整个自动驾驶系统的核心。
还看蔚来的例子,ES8/ES6上安装的“大脑”是Mobileye EyeQ4芯片,这也是这款芯片的全球首装。
Mobileye自不必多说,是自动驾驶和ADAS领域最知名的供应商,长期跟Tesla、GM、Audi、BMW等厂商合作。而EyeQ4这款芯片也很有来头,它可以支持L3级自动驾驶,算力达到2.5TOPS (TOPS是算力单位,1 TOPS代表处理器每秒钟可进行一万亿次操作),是上一代产品EyeQ3的8倍,而EyeQ3曾广泛应用于配备Autopilot Hardware 1 的Tesla Model S和Model X。
控制Control
就是指控制执行器,执行前面决策的过程,这也是传统能源车和电动车的自动驾驶系统区别最大的地方。
其实无论传统能源车还是电动车,驾驶员开也好,自动驾驶也罢,"控制"的都是这几件事:油门、刹车、方向盘,也就是动力系统、制动系统和转向系统,说的学术一点叫车的纵向控制和横向控制。

转向系统和制动系统有自身的技术沿革,比如转向分传统的液压助力,主流的电动助力EPS和小众一点的线控转向Steering By Wire;制动有主流的真空助力式(真空源可以是发动机的真空度、机械/电动真空泵),前沿的电动助力式(Integrated/Electro-hydraulic Brake)。在自动驾驶中,这两大系统的控制在传统能源车和电动车上并没有本质的区别。(电动车上的反拖/制动能量回收算一个不大不小的区别吧)
在自动驾驶控制中,传统能源车与电动车最大的区别体现在动力系统的控制。传统能源车的动力总成,是内燃机+变速箱,而电动车的动力总成,是电动机+减速箱。
如果从底层看,内燃机的控制逻辑显然要比电动机复杂得多,对于内燃机,我们需要控制进气、喷油、点火(下图是典型的汽油机发动机控制模块的框图)。
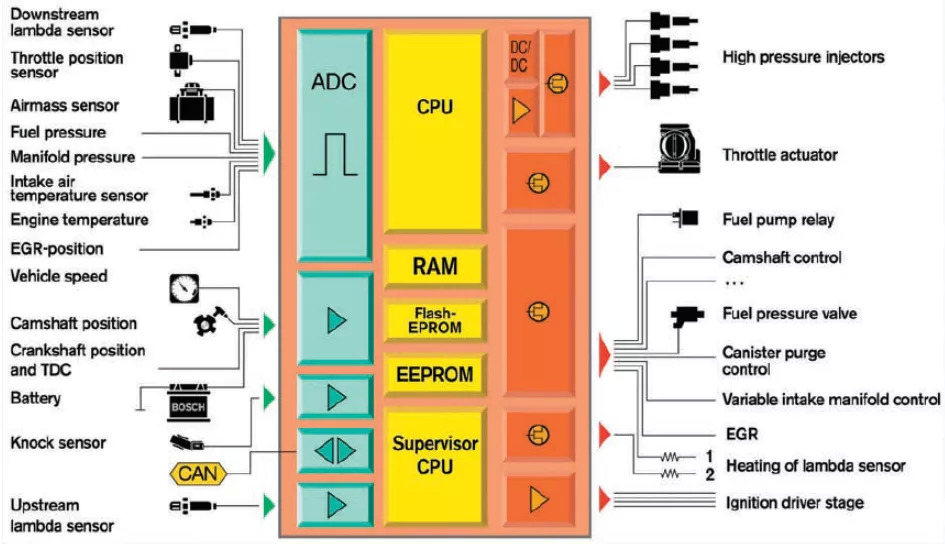
而对电动机而言,需要控制的变量只有电压和电流,两者复杂度的差别是数量级的差别。
也许你会说,没关系,这些底层的控制都由供应商搞定了,我们只需要管扭矩、转速这些就好了。即便这样,由于变速箱的存在,传统能源车依然比电动车多了档位这样一个变量,多了一些复杂度。
电动机的控制简单直接,反映到响应速度上,可以达到毫秒级别,而内燃机由于其特性,响应速度跟电动机比也有着数量级的差别,控制精度自然也有差距。

这些方面的差距,在越高级的自动驾驶系统中,也越“拖后腿”。
再引用一句科技部部长万钢的话:现代汽车上的探测器越来越多,有毫米波雷达、摄像头,有对外通信系统,有定位技术。与之相应的,刹车、油门、电子稳定系统、电助力转向等也在发展。而电动汽车,则是自动驾驶的最佳载体。因为电动汽车从电机、电池、电控开始,就是通透的动力驱动系统网络。
OTA+高潜力的电子电气架构, 助力新势力电动车"原生"互联
下面再来说说互联Connected。
我用了"新势力"这个词,是为了区别于传统的、基于原有平台,仅适配了电动动力总成的电动车,典型的新势力如特斯拉(新势力中的老势力)、蔚来等。
汽车历经百年,发展到今天的样子,是错综复杂的技术、专利、基础设施、环境、行业规范、政策法规等综合作用的结果。传统厂商的技术积累、技术壁垒同时也是一个包袱,让这个行业的主要参与者们不能完全放开手脚、基于对未来的想象和预期去设计当前的产品。
近些年以智能手机为代表的移动互联行业飞速发展,被智能手机和移动互联服务"惯坏了"的用户们对汽车的预期正在悄悄发生着变化,加上车用动力电池技术不断成熟,造车新势力们应运而生。
OTA黑科技
如果选一项最能体现新势力电动车特点的关键功能,我认为非OTA莫属。
OTA,即Over The Air,其实是一个来自于手机行业的词,是指从空中下载软件进行升级、更新,看似一项很小的功能,却为汽车打开了"自我进化"的大门。
不带OTA功能的传统车辆就像手机里的功能机,我们购买的是它的"功能",购买时有什么功能用到报废也还是这些功能;而带OTA功能的车辆更像智能手机,我们购买的是一个平台,后续不断迭代更新的固件、软件带来非常多的可能性。
它可以:
在硬件支持的情况下,通过软件升级提供给客户新的重要功能,典型的例子是特斯拉的Autopilot,蔚来NIO Pilot;
更新人机交互界面和运行其上的应用程序,满足客户的不同需要;
快速改进、升级现有的功能,修复原有软件中的bug。
也许你会说,传统车的软件不是也可以升级吗?的确,目前主流车辆基本都可以在经销店车间中连接专用工具进行控制模块固件的升级,但这种升级一般是以解决bug为目的进行的,限于其线下的形式,更新的频率不可能太高;另外一些传统车辆也配备了OTA功能,但受限于车辆本身的电子电气架构和设计理念,这些车上的OTA功能往往仍以修复bug为主,客户体验、功能方面的更新升级很有限,且多局限于娱乐系统。
作为对比,蔚来的FOTA(Firmware Over The Air)功能支持包括动力、底盘、车身、娱乐、自动驾驶、智能网联等各大系统控制模块的固件升级。例如,在ES8 1.1.0版FOTA软件升级中,提供了包括360全景影像、远近光自动控制、前碰撞预警、车道偏离预警、尾门脚踢感应开启等多项涵盖不同系统的重要功能;而最近一次全新ES8甚至可以通过FOTA升级底盘和多种驾驶模式。
说到这儿,就要引出新势力电动车的另一项优势:高潜力的电子电气架构
不论是OTA还是自动驾驶,都涉及车辆上大量的数据计算和传输,这需要性能强大的控制模块和高速稳定的车载电子网络作为支撑。
2017年博世公布其在整车电子电气架构方面的战略图,博世将整车电子电气架构的发展分为三大类,分别是模块化和集成化架构方案(分布式)、集中式域融合架构方案和车载电脑云计算架构方案。目前市面上大多数传统车型的架构方案都属于模块化和集成化架构方案,如下示意:
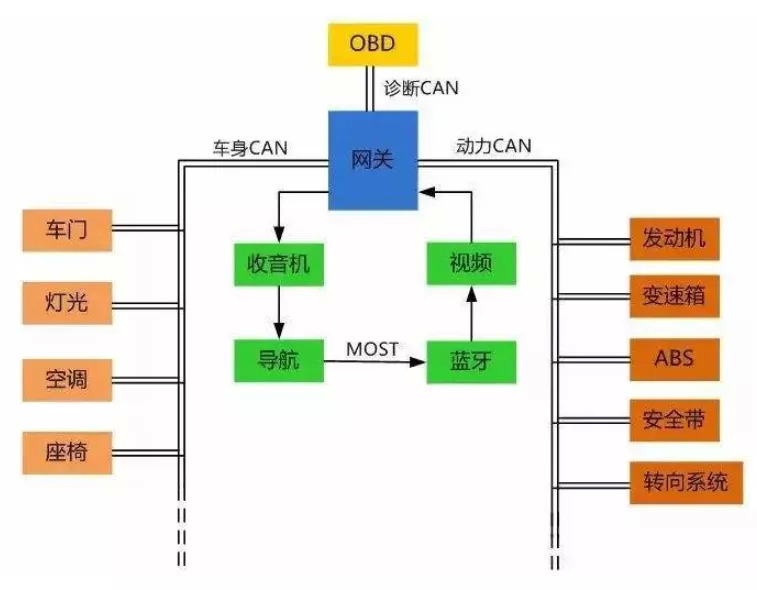
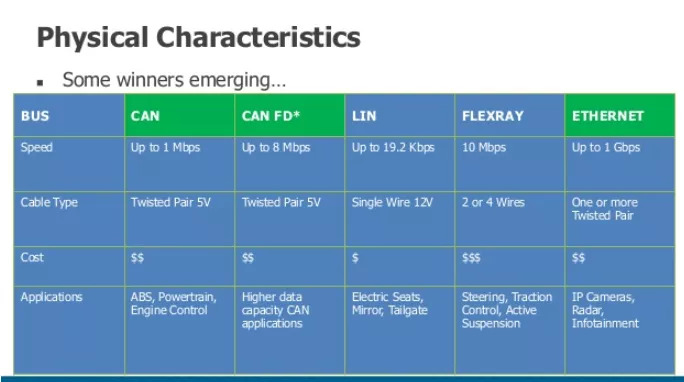
在这种形式的架构下,主要按功能划分模块,各模块通过各种总线连接起来,这种网络架构是长期进化的结果,所以在一辆车上我们可以看到速度不一的、众多形式的总线类型,速度从慢到快,有LIN/CAN/Flexray/MOST/Ethernet等,分别用于不同的系统。
而新势力玩家则少了很多历史包袱,在进行架构规划时更像是在进行基因工程,可以更纯粹地着眼于未来的需求,剔除坏的/留下好的,采用最优的选择。
Tesla是这方面的优秀代表,从Model S到Model 3,线束长度减半(3千米->1.5千米),再到Model Y,线束长度目标减到惊人的100米。Model Y的电子架构就采用了集中式域融合架构方案,重新划分了“域”的概念,打破了功能与功能之间的壁垒划分和传统整车架构设计的思维,跨入了车载电脑和区域导向架构。
蔚来对车身电子网络架构的规划同样采取了集中式域融合架构,采用了以太网作为主干网络,为更级别自动驾驶和FOTA储备了坚实的硬件基础。

新势力电动车的另一个重要优势是车载电气系统的容量。
自动驾驶系统是用电大户,同时,更多舒适性、娱乐性功能、甚至OTA功能都对车辆电气系统提出了更多挑战。
我们知道,传统能源车的电能来自于由发动机带动的发电机,发出的电能一部分直接供给车辆用电器,另一部分则存入12V蓄电池中。有经验的司机都知道如果需要长时间坐在车里等人,同时开着车灯、听听音乐什么的,那最好要么保持发动机运行,要么尽可能关闭不需要的功能,这就是因为12V蓄电池的容量有限,车上很多系统耗电量都不小,而停车熄火状态下,蓄电池只放电而无法充电,很容易造成深度放电,影响下次车辆起动。
OTA软件升级的工况跟上面的情况很类似,也是在车辆停止、发动机关闭的情况下进行,因而在软件升级开始前,系统需要判断12V蓄电池的SOC (充电状态)是否足以支持升级期间的车辆供电,这个条件比较苛刻,否则如果车辆升级期间供电出现问题,就会造成抛锚。

而对电动车来说,保证停车时的供电就要容易很多,因为高压电池是一个巨大的能量来源,只要高压电池电量够,停车期间,它就可以通过DC/DC转换器源源不断地给12V蓄电池充电,保证停车期间的用电需求,包括OTA的需求。
综上所述,电动车,特别是新势力电动车,相比于传统燃油车,在自动驾驶和互联等方面有着诸多不可比拟的优势。
若要问孰优孰劣,还是那句话:传统能源车拥有现在,而电动车拥有未来。
评论